在前面Android OpenGL ES(六):创建实例应用OpenGLDemos程序框架我们创建了示例程序的基本框架,并提供了一个“Hello World”示例,将屏幕显示为红色。
本例介绍OpenGL ES 3D图形库支持的几种基本几何图形,通常二维图形库可以绘制点,线,多边形,圆弧,路径等等。OpenGL ES 支持绘制的基本几何图形分为三类:点,线段,三角形。也就是说OpenGL ES 只能绘制这三种基本几何图形。任何复杂的2D或是3D图形都是通过这三种几何图形构造而成的。
比如下图复杂的3D图形,都有将其分割成细小的三角形面而构成的。然后通过上色(Color),添加材质(Texture),再添加光照(lighting),构造3D效果的图形:

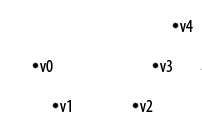
点,线段,三角形都是通过顶点来定义的,也就是顶点数组来定义。对应平面上的一系列顶点,可以看出一个个孤立的点(Point),也可以两个两个连接成线段(Line Segment) ,也可以三个三个连成三角形(Triangle)。这些对一组顶点的不同解释就定义了Android OpenGL ES可以绘制的基本几何图形,下面定义了OpenGL ES定义的几种模式:
GL_POINTS
绘制独立的点。
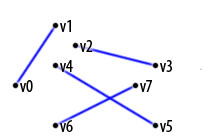
GL_LINE_STRIP
绘制一系列线段。

GL_LINE_LOOP
类同上,但是首尾相连,构成一个封闭曲线。
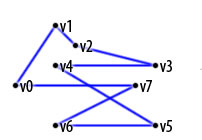
GL_LINES
顶点两两连接,为多条线段构成。
GL_TRIANGLES
每隔三个顶点构成一个三角形,为多个三角形组成。
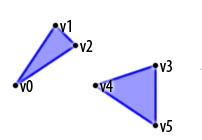
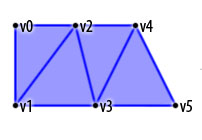
GL_TRIANGLE_STRIP
每相邻三个顶点组成一个三角形,为一系列相接三角形构成。
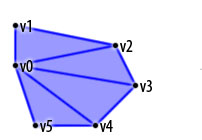
GL_TRIANGLE_FAN
以一个点为三角形公共顶点,组成一系列相邻的三角形。
以上模式对应到Android渲染方法:
OpenGL ES提供了两类方法来绘制一个空间几何图形:
- public abstract voidglDrawArrays(int mode, int first, int count) 使用VetexBuffer 来绘制,顶点的顺序由vertexBuffer中的顺序指定。
- public abstract voidglDrawElements(int mode, int count, int type, Buffer indices) ,可以重新定义顶点的顺序,顶点的顺序由indices Buffer 指定。
其中mode 为上述解释顶点的模式。
前面说过顶点一般使用数组来定义,并使用Buffer来存储以提高绘图性能
如下面定义三个顶点坐标,并把它们存放在FloatBuffer 中:
float[] vertexArray = new float[]{ -0.8f , -0.4f * 1.732f , 0.0f, 0.8f , -0.4f * 1.732f , 0.0f, 0.0f , 0.4f * 1.732f , 0.0f, }; ByteBuffer vbb = ByteBuffer.allocateDirect(vertexArray.length*4); vbb.order(ByteOrder.nativeOrder()); FloatBuffer vertex =vbb.asFloatBuffer(); vertex.put(vertexArray); vertex.position(0);
有了顶点的定义,下面就可以通过打开Android OpenGL ES(二):OpenGL ES管道(Pipeline)的相应开关将顶点参数传给OpenGL 库:
打开顶点开关和关闭顶点开关的方法如下:
gl.glEnableClientState(GL10.GL_VERTEX_ARRAY);
...
gl.glDisableClientState(GL10.GL_VERTEX_ARRAY);在打开顶点开关后,将顶点坐标传给OpenGL 管道的方法为:glVertexPointer:
public void glVertexPointer(int size,int type,int stride,Buffer pointer)
- size: 每个顶点坐标维数,可以为2,3,4。
- type: 顶点的数据类型,可以为GL_BYTE, GL_SHORT, GL_FIXED,或 GL_FLOAT,缺省为浮点类型GL_FLOAT。
- stride: 每个相邻顶点之间在数组中的间隔(字节数),缺省为0,表示顶点存储之间无间隔。
- pointer: 存储顶点的数组。
应用用上可以般顶点的颜色值存放在对应顶点后面,如下图,RGB 采用4 字节表示,此时相邻顶点就不是连续存放的,stride 值为4
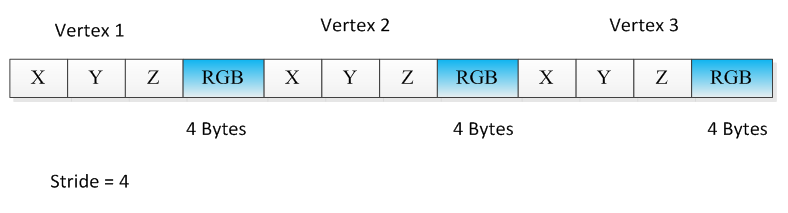
对应顶点除了可以为其定义坐标外,还可以指定颜色,材质,法线(用于光照处理)等。
glEnableClientState 和 glDisableClientState 可以控制的pipeline开关可以有:GL_COLOR_ARRAY (颜色) ,GL_NORMAL_ARRAY (法线), GL_TEXTURE_COORD_ARRAY (材质), GL_VERTEX_ARRAY(顶点), GL_POINT_SIZE_ARRAY_OES等。
对应的传入颜色,顶点,材质,法线的方法如下:
glColorPointer(int size,int type,intstride,Buffer pointer) glVertexPointer(int size, int type, intstride, Buffer pointer) glTexCoordPointer(int size, int type, intstride, Buffer pointer) glNormalPointer(int type, int stride, Buffer pointer)
如果需要使用三角形来构造复杂图形,可以使用GL_TRIANGLE_STRIP或GL_TRIANGLE_FAN模式,另外一种是通过定义顶点序列:
如下图定义了一个正方形:
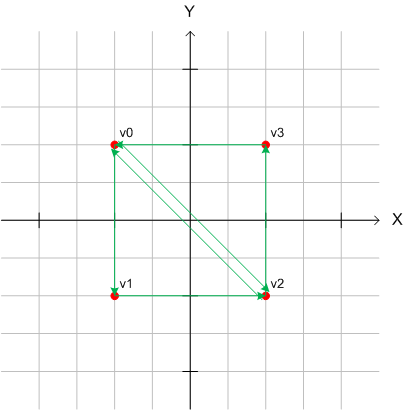
对应的顶点和buffer 定义代码:
private short[] indices = { 0, 1, 2, 0, 2, 3}; //To gain some performance we also put this ones in a byte buffer. //short is 2 bytes, therefore we multiply the number if vertices with 2. ByteBuffer ibb = ByteBuffer.allocateDirect(indices.length * 2); ibb.order(ByteOrder.nativeOrder()); ShortBuffer indexBuffer =ibb.asShortBuffer(); indexBuffer.put(indices); indexBuffer.position(0);
定义三角形的顶点的顺序很重要在拼接曲面的时候,用来定义面的顶点的顺序非常重要,因为顶点的顺序定义了面的朝向(前向或是后向),为了获取绘制的高性能,一般情况不会绘制面的前面和后面,只绘制面的“前面”。虽然“前面”“后面”的定义可以应人而易,但一般为所有的“前面”定义统一的顶点顺序(顺时针或是逆时针方向)。
下面代码设置逆时针方法为面的“前面”:
gl.glFrontFace(GL10.GL_CCW);
打开 忽略“后面”设置:
gl.glEnable(GL10.GL_CULL_FACE);
明确指明“忽略“哪个面的代码如下:
gl.glCullFace(GL10.GL_BACK);