产品介绍
目前国内研究仿生四足的学者不在少数,但由于伺服驱动器结构复杂、技术门槛高、成本高等原因使得仿生四足机器人的研究困难重重。而伺服舵机则不然,它相对于伺服电机而言具有体积小、价格低等优势,既能达到位置控制又能实现闭环反馈,因此伺服舵机可在某些应用场景代替伺服电机。
今天给大家推荐一款智能佳机器人公司的XM430-W350-R数字伺服舵机(以下简称为 R系列数字伺服舵机)。
下面详细介绍一下这款R系列舵机。
产品规格:

一张详细的数据表格可以体现这款舵机有多么的专业,功能是如此的丰富,市场上常见的舵机一般使用PWM实现角度控制,往往具有精度不高,载荷较低等不足,用于制作机器人,四足,机械手等,常常达不到理想的状态,难以得到想要的实验结果和数据。这一类舵机抗干扰能力也相对较差,不仅会产生抖动等问题,还会出现死区范围大而导致的定位误差大,舵机精度低等不足。
R系列数字伺服舵机的高性能和多传感器解决了很多舵机经常出现的问题,STM32F1X系列的主控芯片高速的运算速度以及稳定的传输方式给舵机带来的“质”的提升,稳定的中位脉冲,极致的缩小了死区提高精度。
控制方式:
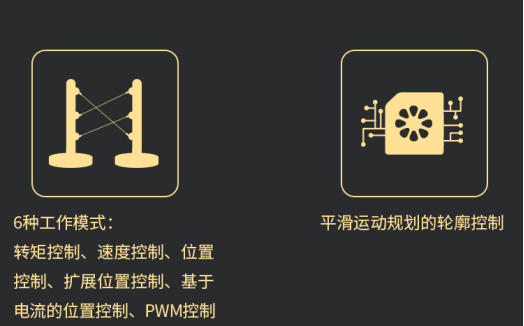
R系列数字伺服舵机提供六种控制模式,以及工业控制上经常使用的轮廓控制,不在是单一的PWM控制,可供开发人员选择合适的控制方式,多样性的验证机器人抗干扰能力,W350在人形机器人,仿生机械,四足,六足等得到广泛的应用,且代替了伺服电机降低了机器人开发的成本。
兼容设备:
主板:OPEN CM485扩展板和OpenCR1.0
PC交互:USB2Dynamixel(Molex-JST转换线必需),U2D2
开发环境:
RoboPlus 2.0 图形化软件, OpenCM IDE, SDK, Drawings
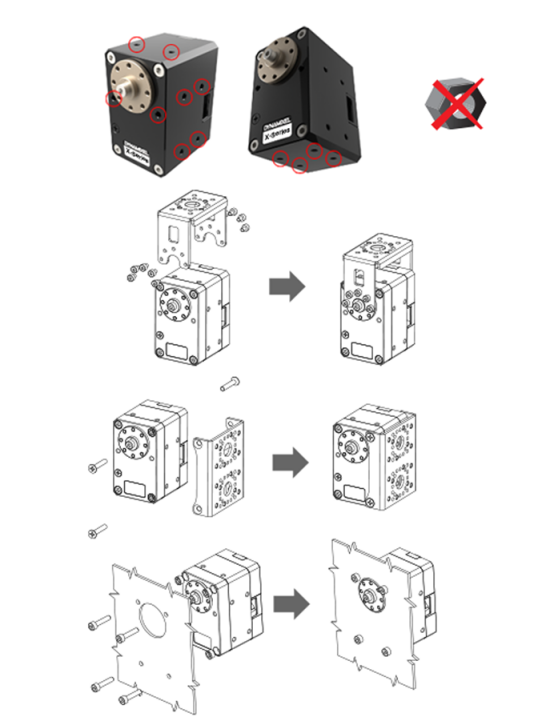
连接方式:
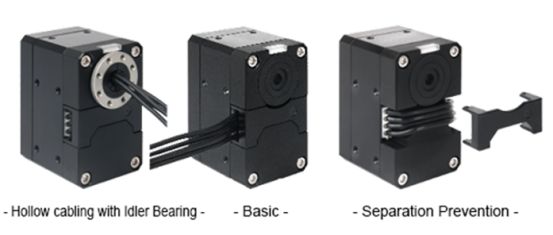
R系列舵机链接方式多达三种,可满足机械工程师在结构设计方面的多种要求。
复杂的控制架构:

根据开发人员的需求提供各种反馈和控制方法,协议2.0提供可靠的数据包通信。
大扭矩的设计结构:
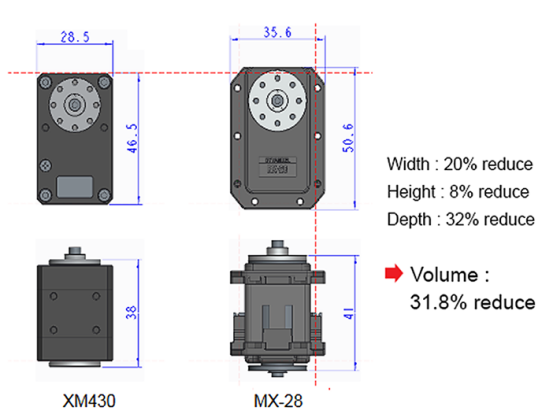
舵机结构的改变减少了舵机的长度宽度,增大了扭矩
紧凑的设计结构:
将螺丝直接安装到外壳上,使舵机紧凑有力。
产品包含:

R系列数字伺服舵机基于STM32F103X控制芯片,搭载了基本的通信外设功能,用于多舵机通信,减少开发板IO口的使用,实现传感器信息的反馈以及时响应闭环控制。具有位置,速度,负载,电流,输入电压,轨迹等多种传感器反馈,用以PID算法实现,步态算法等研究。
很多人可能不知道反馈对机器人的重要性,反馈代表什么,有什么作用。反馈代表着机器人的感官,代表着机器人的效应器。机器人有了反馈才能像我们人一样对外界做出反应。双目摄像头就像我们的眼睛,温度传感器就像我们的皮肤,压力传感器就像我们的小手。扎一下我们的手指,我们会感受到疼痛,大脑就会做出相应的反应。
舵机也一样,只有反馈了所需要的速度,角度等信息。机器人的大脑才会知道机器人的这一时刻的质态,才能够有能力去做出相应的反应。人工智能不是遥控控制,而是机器人它自己的大脑控制着自己,人工智能背景下,反馈可以说是决定着你像不像人一样,可以感受到外界。
如果你想做出一个可以自己思考的机器人,那么XM430-W350-R将会是你很好的帮手。
北京智能佳科技有限公司成立于2006年8月,连续四届国家级高新技术企业,是一家以教育机器人和服务机器人为主的国内最早专业从事机器人研发与销售的公司之一。智能佳公司通过十余年的发展,拥有自己一支经验丰富的研发队伍,先后成功的研制出小型人形教育机器人、室内迎宾机器人、室外巡检机器人、微缩智能车、开源移动平台、可重构机器人等多款机器人。2018年成功研制出国内首款室内微缩智能车仿真先导实验平台、室外园林巡检机器人,且已分别成功应用于北京交通大学、同济大学、廊坊园林基地、北京世园会、2022冬奥会等实际运用。
科学教育是兴国之基础,素质教育是强国之关键,智能佳坚持“共享、共生、普及、普惠”的企业精神,做中国教育机器人领域的领航者。
共享——与兄弟企业共享机器人技术;
共生——共同打造机器人行业生态圈;
普及——将人工智能的普及性教育作为企业使命和责任;
普惠——坚持将质优价廉机器人产品带给中国人民,以及世界人民。
联系电话:010-82488500/13717969551
客服电话:400-099-1872
地 址:北京市亦庄凉水河二街大族企业湾16栋306
E-mail:znj@bjrobot.com