摘要:
测试方案 测试方案CAN0和CAN1相连,互相收发数据。使用标准模式CAN1发送数据CAN0接收数据。使用EJTAG中bin文件夹内的can.c代码,使用callbin的方式测试CAN的收发。Can.c中CAN默认工作在扩展模式。当测试CAN的标准模式时需要对代码进行如下修改。软件流程设置控制器进入复位模式检测到有复位请求后将中止当前接收/发送的信息而进入复位模式,一旦向复位位传送了1-0的下降沿CAN控制器将返回工作模式设置总线定时。接收数据:查询中断寄存器的RI接收中断是否为1。
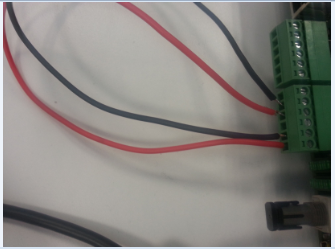
- CAN0和CAN1相连,互相收发数据。连接方式如下图:
- 使用扩展模式CAN1发送数据CAN0接收数据。
- 使用标准模式CAN1发送数据CAN0接收数据。
- 使用EJTAG中bin文件夹内的can.c代码,使用callbin的方式测试CAN的收发。Can.c中CAN默认工作在扩展模式。当测试CAN的标准模式时需要对代码进行如下修改。
- 设置控制器进入复位模式
- 检测到有复位请求后将中止当前接收/发送的信息而进入复位模式,一旦向复位位传送了 1-0 的下降沿 CAN 控制器将返回工作模式
- 设置总线定时。
- 总线定时0寄存器对应BTR0
- 总线定时1寄存器对应BTR1
- 设置标准模式还是扩展模式
- 向偏移地址为1的寄存器写0x81则为扩展模式
- 向偏移地址为1的寄存器写0x1则为标准模式
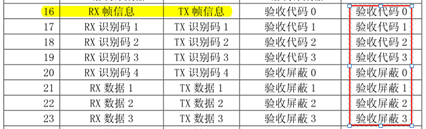
- 设置过滤,当消息的ID与上验收屏蔽值等于验收代码与上验收屏蔽值时,控制器接收消息。
- 扩展模式,设置寄存器偏移地址为16~23的寄存器,下图红色方框中。
- 标准模式,设置寄存器偏移地址为4、5的寄存器

- 向控制寄存器的RRbit写0,进入正常工作模式。
- 使能中断
- 扩展模式:向偏移地址为4的寄存器写入0xff。
- 标准模式:向控制寄存器写入0x1e打开中断。
- 发送数据
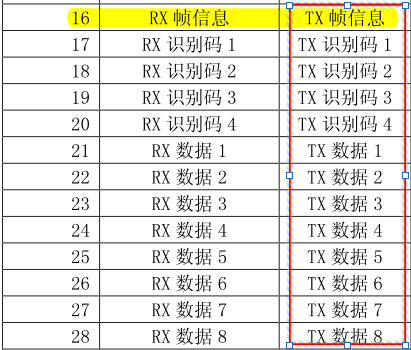
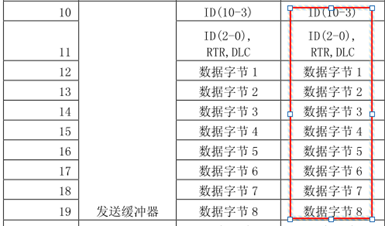
- 扩展模式:将发送的数据写入如下图所示寄存器。
- 标准模式:将发送的数据写入如下图所示寄存器。
- 需要保证发送的帧不被接受端所过滤掉。
- 发送数据:数据写入后,将命令寄存器的TR置1。
- 两种模式操作相同。
- 接收数据:查询中断寄存器的RI接收中断是否为1。为1则说明接收到数据。
- 两种模式操作相同。
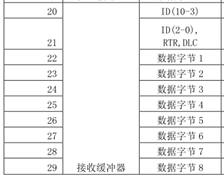
- 读取接收的数据
- 扩展模式
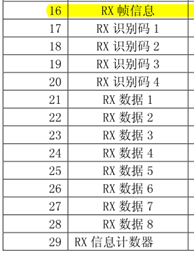
- 标准模式
CAN在每次发送/接收数据后需要复位。
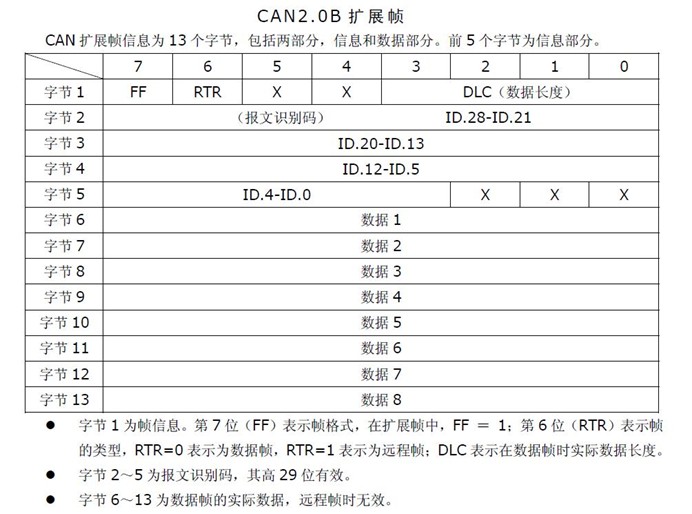
CAN的两种帧格式