摘要:
什么是模板匹配模板匹配是在大图像中找到小图像,即在一个图像中找到另一个模板图像的位置:OpenCV使用cv2。matchTemplate()来实现模板匹配。答案是它没有效果,因为只有翻译动作没有考虑其他图像特征。这也是模板匹配的局限性,但可以使用改进的模板匹配算法。
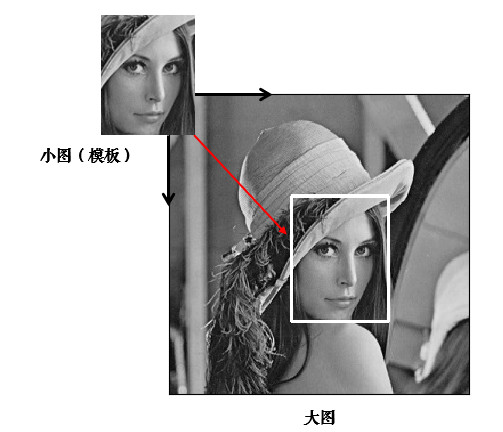
啥叫模板匹配
模板匹配就是在大图中找小图,也就说在一幅图像中寻找另一幅模板图像的位置:
OpenCV使用 cv2.matchTemplate() 实现模板匹配。
import cv2 import numpy as np from matplotlib import pyplot as plt
img = cv2.imread('lena.jpg', 0) template = cv2.imread('face.jpg', 0) h, w = template.shape[:2] # rows->h, cols->w
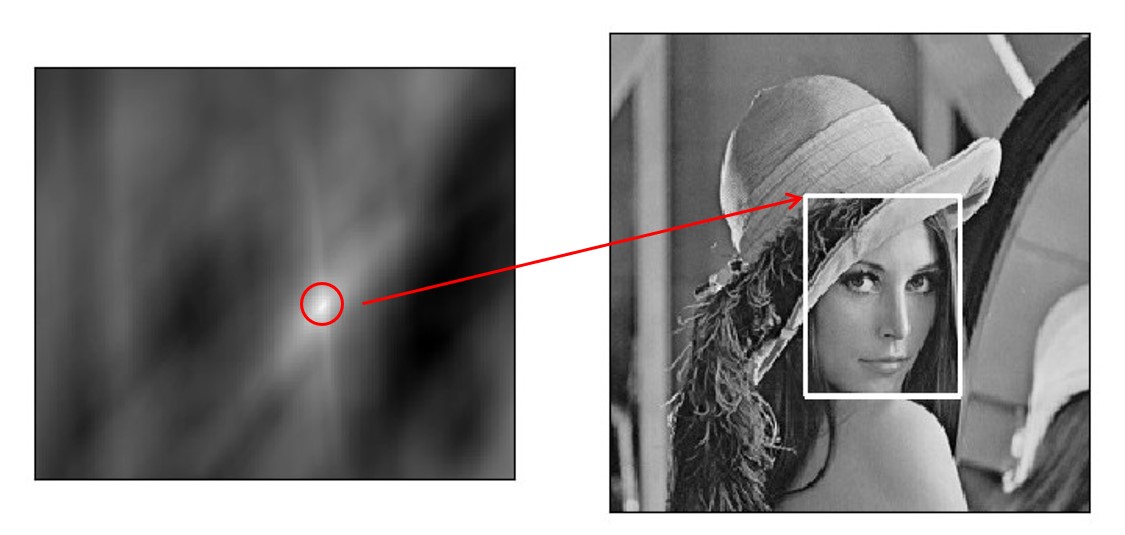
匹配函数返回的是一幅灰度图,最白的地方表示最大的匹配。使用 cv2.minMaxLoc() 函数可以得到最大匹配值的坐标,以这个点为左上角角点,模板的宽和高画矩形就是匹配的位置了:
# 相关系数匹配方法: cv2.TM_CCOEFF res = cv2.matchTemplate(img, template, cv2.TM_CCOEFF) min_val, max_val, min_loc, max_loc = cv2.minMaxLoc(res) left_top = max_loc # 左上角 right_bottom = (left_top[0] + w, left_top[1] + h) # 右下角 cv2.rectangle(img, left_top, right_bottom, 255, 2) # 画出矩形位置 plt.subplot(121), plt.imshow(res, cmap='gray') plt.title('Matching Result'), plt.xticks([]), plt.yticks([]) plt.subplot(122), plt.imshow(img, cmap='gray') plt.title('Detected Point'), plt.xticks([]), plt.yticks([]) plt.show()
模板匹配的原理
模板匹配的原理其实很简单,就是不断地在原图中移动模板图像去比较,有6种不同的比较方法,详细请参考:TemplateMatchModes
- 平方差匹配 CV_TM_SQDIFF:用两者的平方差来匹配
- 归一化平方差匹配 CV_TM_SQDIFF_NORMED
- 相关匹配 CV_TM_CCORR:用两者的乘积匹配,数值越大表明匹配程度越好
- 归一化相关匹配 CV_TM_CCORR_NORMED
- 相关系数匹配 CV_TM_CCOEFF:用两者的相关系数匹配,1表示完美匹配,-1表示最差匹配
- 归一化相关系数匹配 CV_TM_CCOEFF_NORMED
归一化的意思就是将值统一到0~1,这六种方法的对比详情请见 Template Matching. 模板匹配也是应用卷积来实现的:假设原图大小为 WxH,模板图大小为 w×h,那么生成图大小是(W-w+1)x(H-h+1),生成图中的每个像素值表示原图与模板的匹配程度
匹配多个物体
前面我们是找最大匹配的点,所以只能匹配一次。我们可以设定一个匹配阈值来匹配多次:
# 1. 读入原图和模板 img_rgb = cv2.imread('mario.jpg') img_gray = cv2.cvtColor(img_rgb, cv2.COLOR_BGR2GRAY) template = cv2.imread('mario_coin.jpg', 0) h, w = template.shape[:2] # 归一化平方差匹配 res = cv2.matchTemplate(img_gray, template, cv2.TM_CCOEFF_NORMED) threshold = 0.8 # 这段代码后面会有解释 loc = np.where(res >= threshold) # 匹配程度大于80%的坐标y,x for pt in zip(*loc[::-1]): # *号表示可选参数 right_bottom = (pt[0] + w, pt[1] + h) cv2.rectangle(img_rgb, pt, right_bottom, (0, 0, 255), 2) cv2.imwrite('res.png', img_rgb)

这里解释一下第三段的代码:
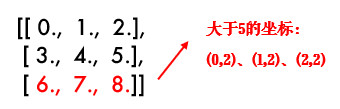
1. np.where() 在这里返回res中值大于0.8的所有坐标,如:
x = np.arange(9.).reshape(3, 3) print(np.where(x > 5))
(array([2, 2, 2], dtype=int64), array([0, 1, 2], dtype=int64))
结果的含义是(先y坐标,在x坐标)
2. zip() 函数
x = [1, 2, 3] y = [4, 5, 6] print(list(zip(x, y)))
[(1, 4), (2, 5), (3, 6)]
这样的解释的话,第三段代码就好理解了:因为loc是先y坐标再x坐标,所以用loc[::-1]翻转一下,然后再用zip函数拼接一下。
思考一下:
图片旋转或缩放的话,模板匹配还有作用吗?
答案是没有作用,因为只有平移的动作,并没有考虑到其他图像特征。这也是模板匹配的局限性所在,但可以使用改进的模板匹配算法。
参考百科链接:https://baike.baidu.com/item/模板匹配