基于MCP2515的Linux CAN总线驱动程序设计(二)
作者:李老师,华清远见嵌入式学院讲师。
1.前言
CAN(Controller Area Network)总线,即控制器局域网总线,是一种有效支持分布式控制或实时控制的串行通信网络。由于其高性能、高可靠性、及独特的设计和适宜的价格而广泛应用于工业现场控制、智能楼宇、医疗器械、交通工具以及传感器等领域,并已被公认为几种最有前途的现场总线之一。CAN总线规范已经被国际标准化组织制订为国际标准ISO11898,并得到了众多半导体器件厂商的支持。
本文使用华清远见FS2416平台。FS2416使用Socket网络设备驱动和字符设备驱动两种方式向Linux内核提供MCP2515的驱动,上篇文章介绍了使用Socket方式设计的基于MCP2515的Linux CAN总线驱动程序,这篇文章主要介绍编写一个MCP2515的字符设备驱动。
2.FS2416简介

图1 FS2416开发板
FS2416采用的是三星公司的ARM926EJ内核CPU S3C2416,无论从性能上,还是成本上, S3C2416都强于2440,是2440的最完美替代者。
作为32/16 bit RISC指令集、低成本、低功耗、高性能的微处理器。S3C2416使用了65nm的制作工艺从而降低成本、功耗及提高性能,其使用的ARM926EJ的核心,集成了2D图形加速,添加了低功耗模式,支持内部ROM/RAM引导,支持moviNand启动和低功耗音频编解码。此外相对于其他ARM9芯片,它的外设也得到了升级,有更多的资源。
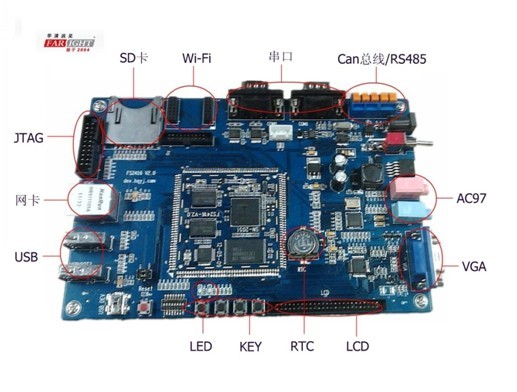
图2 FS2416板级资源介绍
3.MCP2515简介
MCP2515是一种独立的CAN总线通信控制器,是Microchip公司首批独立CAN解决方案的升级器件,其传输能力较Microchip公司原有CAN控制器(MCP2510)高两倍,最高通信速率可达到1Mbps。MCP2515能够接收和发送标准数据帧和扩展数据帧以及远程帧,通过两个接收屏蔽寄存器和六个接收过滤寄存器滤除无关报文,从而减轻CPU负担。
MCP2515主要功能参数及电气特性如下:
(1)支持CAN技术规范2.0A/B, 最高传输速率达到1Mbps;
(2)支持标准数据帧、扩展数据帧和远程帧,每帧数据域长度可为0~8个字节;
(3)内含两个的接收缓冲器和三个发送缓冲器,并且可编程设定优先级;
(4)内含六个29位(bit)的接收过滤寄存器和两个29位(bit)的接收屏蔽寄存器;
(5)高速SPI接口,支持SPI 0,0和1,1模式;
(6)一次性模式可确保报文被一次性传输;
(7)具有可编程时钟脉冲输出引脚,可作为其他芯片时钟信号源;
(8) 帧起始(SOF)信号输出功能可被用于在确定的系统中(如时间触发CAN-TTCAN)执行时隙功能,或在CAN总线诊断中决定早期总线出级;
(9) 采用低功耗CMOS技术,工作电压:2.7V~5.5V, 工作电流:5mA(待机状态1μA);
(10)工作温度范围:(I)-40℃到+85℃,(E)-40℃到+125℃。
4.硬件设计
MCP2515与S3C2416的硬件连接图如图3所示。如硬件原理图可知MCP2515芯片连接在S3C2416芯片的SPI0上,中断接在GPF1上;MCP2515输出连接SN65HVD230 CAN总线收发器,SN65HVD230是德州仪器公司生产的3.3V CAN收发器。为了节省功耗,缩小电路体积,MCP2515 CAN总线控制器的逻辑电平采用LVTTL,SN65HVD230就是与其配套的收发器。
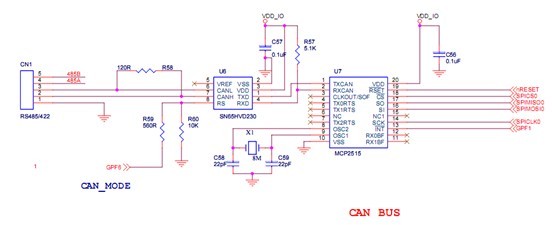
图3 MCP2515硬件连接图
5.MCP2515 CAN字符设备驱动的实现
5.1 SPI子系统简介
基于子系统去开发驱动程序已经是Linux内核中普遍的做法了。前面介绍使用Socket编写MCP2515 CAN总线的驱动也是基于SPI子系统开发的。在驱动开发前,需要先熟悉下SPI通讯协议中的几个关键的地方,后面在编写驱动时,需要考虑相关因素。
SPI总线由MISO(串行数据输入)、MOSI(串行数据输出)、SCK(串行移位时钟)、CS(使能信号)4个信号线组成。MCP2515与S3C2416的SPI连接如图3所示。SO脚为它的数据输入脚,SI为数据输出脚,SCK为时钟脚。
SPI常用四种数据传输模式,主要差别在于:输出串行同步时钟极性(CPOL)和相位(CPHA)可以进行配置。如果CPOL = 0,串行同步时钟的空闲状态为低电平;如果CPOL = 1,串行同步时钟的空闲状态为高电平。如果CPHA = 0,在串行同步时钟的前沿(上升或下降)数据被采样;如果CPHA = 1,在串行同步时钟的后沿(上升或下降)数据被采样。具体的时序如图4所示。
这四种模式中究竟选择哪种模式取决于设备。如MCP2515芯片手册中说明它可以支持(0,0)(1,1)两种模式,即:CPOL = 0,CPHA = 0和CPOL = 1,CPHA = 1。

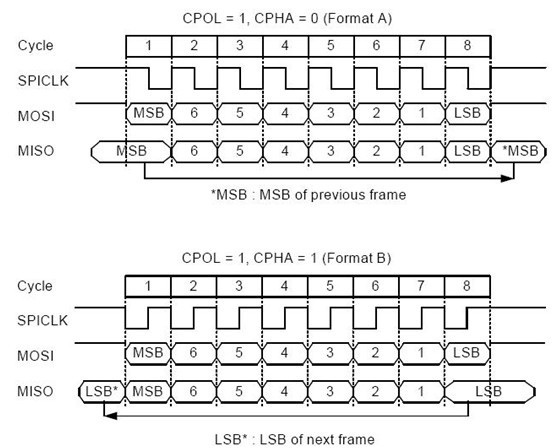
图4 SPI数据传输时序
5.2 Linux下SPI驱动的开发
首先明确SPI驱动层次,如图5所示:
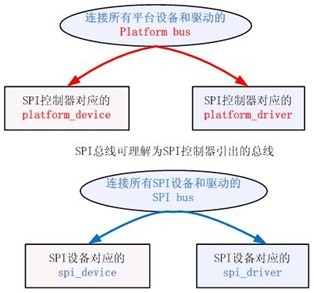
图5 SPI驱动层次
我们以上面的这个图为思路:
① platform bus
platform bus对应的结构是platform_bus_type,这个内核开始就定义好的。我们不需要定义。
② platform_device
SPI控制器对应platform_device的定义方式,同样以S3C2416中的SPI控制器为例,参看arch/arm/plat-s3c24xx/dev-spi.c文件。
01 static u64 s3c_device_spi0_dmamask = 0xffffffffUL;
02
03 struct platform_device s3c_device_spi0 = {
04 .name = "s3c2410-spi",//名称,要和Platform_driver匹配
05.id= 0, //第0个控制器,S5PC100中有3个控制器
06.num_resources= ARRAY_SIZE(s3c_spi0_resource),//占用资源的种类
07.resource= s3c_spi0_resource, //指向资源结构数组的指针
08.dev= {
09.dma_mask = &s3c_device_spi0_dmamask,//dma寻址范围
10.coherent_dma_mask = 0xffffffffUL
11 //可以通过关闭cache等措施保证一致性的dma寻址范围
12}
13 };
14
15 EXPORT_SYMBOL(s3c_device_spi0);
③ platform_driver
再看platform_driver,参看drivers/spi/spi_s3c24xx.c文件
static struct platform_driver s3c24xx_spi_driver = {
.driver = {
.name = "s3c24xx-spi", //名称,和platform_device对应
.owner = THIS_MODULE,
},
.remove = s3c24xx_spi_remove,
.suspend = s3c24xx_spi_suspend,
.resume = s3c24xx_spi_resume,
};
MODULE_ALIAS("platform:s3c24xx-spi");
static int __init s3c24xx_spi_init(void)
{
return platform_driver_probe(&s3c24xx_spi_driver, s3c24xx_spi_probe);
}
和平台中注册的platform_device匹配后,调用s3c24xx_spi_probe。然后根据传入的platform_device参数,构建一个用于描述SPI控制器的结构体spi_master,并注册。spi_register_master(master)。后续注册的spi_device需要选定自己的spi_master,并利用spi_master提供的传输功能传输spi数据。
和I2C类似,SPI也有一个描述控制器的对象叫spi_master。其主要成员是主机控制器的序号(系统中可能存在多个SPI主机控制器)、片选数量、SPI模式和时钟设置用到的函数、数据传输用到的函数等。
01 struct spi_master {
struct device dev;
struct list_head list;
/* 表示是SPI主机控制器的编号。由平台代码决定. */
s16bus_num;
/* 控制器支持的片选数量,即能支持多少个spi设备 */
u16num_chipselect;
/* some SPI controllers pose alignment requirements on DMAable
* buffers; let protocol drivers know about these requirements. */
u16dma_alignment;
/* spi_device.mode flags understood by this controller driver */
u16mode_bits;
/* other constraints relevant to this driver */
u16flags;
/* lock and mutex for SPI bus locking */
spinlock_tbus_lock_spinlock;
struct mutexbus_lock_mutex;
/* flag indicating that the SPI bus is locked for exclusive use */
boolbus_lock_flag;
/* 针对设备设置SPI的工作时钟及数据传输模式等。在spi_add_device函数中调用 */
int(*setup)(struct spi_device *spi);
/* bidirectional bulk transfers */
int(*transfer)(struct spi_device *spi, struct spi_message *mesg);
/* called on release() to free memory provided by spi_master */
void(*cleanup)(struct spi_device *spi);
};
这样,我们就可以执行make menuconfig配置内核选项,添加SPI驱动到我们的内核了。
Device drivers->
[*]SPI support ->
<*> Samsung S3C2416 series type SPI
④ spi bus
Spi总线对应的总线类型为spi_bus_type,在内核的drivers/spi/spi.c中定义
struct bus_type spi_bus_type = {
.name = "spi",
.dev_attrs= spi_dev_attrs,
.match= spi_match_device,
.uevent= spi_uevent,
.pm= &spi_pm,
};
EXPORT_SYMBOL_GPL(spi_bus_type);
对应的匹配规则如下:
static int spi_match_device(struct device *dev,struct device_driver *drv)
{
const struct spi_device*spi = to_spi_device(dev);
const struct spi_driver*sdrv = to_spi_driver(drv);
/* Attempt an OF style match */
if (of_driver_match_device(dev, drv))
return 1;
if (sdrv->id_table)
return !!spi_match_id(sdrv->id_table, spi);
return strcmp(spi->modalias, drv->name) == 0;
}
⑤ spi_device
下面是spi_device的构建与注册。spi_device对应的含义是挂接在spi总线上的一个设备,所以描述它的时候应该明确它自身的设备特性、传输要求、及挂接在哪个总线上。参看arch/arm/mach-s3c2416/mach-smdk2416.c文件。
根据硬件原理图图3所示,MCP2515挂在SPI0上,使用中断GPF1。
#define SMDK2416_MCP2515 0
static struct s3c24xx_spi_csinfo smdk_spi0_csi[] = {
{
.set_level = smdk_mmcspi_cs_set_level,
.fb_delay = 0x3,
},
};
static struct mcp251x_platform_data mcp251x_info = {
.oscillator_frequency = 8 * 1000 * 1000, //设置MCP2515外部晶振频率
};
static struct spi_board_info s3c_spi_devs[] __initdata = {
{
.modalias= "mcp2515",//设备名,和spi_driver对应
.mode=SPI_MODE_0,//CPOL=0, CPHA=0
.max_speed_hz=2 * 1000 * 1000,//最大的spi时钟频率
.irq=IRQ_EINT(1),//外部中断GPF1
.bus_num= 0,//设备连接在spi控制器0上
.chip_select= 0,//片选线号
.platform_data= &mcp251x_info,//平台信息
.controller_data = &smdk_spi0_csi[SMDK2416_MCP2515],
},
};
事实上上文提到的spi_master的注册会在spi_register_board_info之后,spi_master注册的过程中会调用scan_boardinfo扫描board_list,找到挂接在它上面的spi设备,然后创建并注册spi_device。
spi_register_board_info(s3c_spi_devs, ARRAY_SIZE(s3c_spi_devs));
⑥ spi_driver
下面就要介绍SPI驱动的编写了。
首先构建一个spi_driver;
static struct spi_driver mcp2515_driver = {
.driver = {
.name = DEVICE_NAME,
.bus = &spi_bus_type,
.owner = THIS_MODULE,
},
.probe= mcp2515_probe,
.remove= __devexit_p(mcp2515_remove),
.suspend= mcp2515_suspend,
.resume= mcp2515_resume,
};
需要调用spi_register_driver函数注册这个spi_driver;
static int __init mcp2515_can_init(void)
{
return spi_register_driver(&mcp2515_driver);
}
在有匹配的spi device时,会调用mcp2515_probe函数;
static int __devinit mcp2515_probe(struct spi_device *spi)
{
struct mcp2515_chip *chip;
int ret;
/* 为设备结构体申请空间 */
chip = kmalloc(sizeof(struct mcp2515_chip), GFP_KERNEL);
if (!chip) {
ret = -ENOMEM;
goto error_alloc;
}
/* 初始化设备结构体 */
dev_set_drvdata(&spi->dev, chip);
……
/* 初始化工作队列 */
INIT_WORK(&chip->irq_work, mcp2515_irq_handler);
/* 申请中断 */
ret = request_irq(IRQ_EINT(1), mcp2515_irq,IRQF_DISABLED | IRQF_TRIGGER_FALLING, DEVICE_NAME, spi);
if (ret < 0) {
printk("MCP2515: Request_irq() Error! ");
goto error_irq;
}
/* 初始化等待队列头 */
init_waitqueue_head(&chip->rwq);
/* 注册设备 */
……
printk ("MCP2515: MCP2515 Can Device Driver. ");
}
根据传入的spi_device参数,可以找到对应的spi_master。当我们加载驱动后如下图显示即说明MCP2515驱动加载成功。

图6 加载MCP2515驱动
接下来,我们就可以利用SPI子系统为我们完成数据交互了。
6.总结
至此,使用SPI子系统注册MCP2515 CAN总线驱动设计的就介绍完了。设备注册成功之后,我们就可以对CAN总线通讯设计实现函数了。
下一篇文章将会详细介绍MCP2515功能函数的实现。