^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^
Date: 20180821
- 1. 由于IP原因导致找不到相机

解决方法:查看相机IP,并配置好本地网口的网络属性。
首先,查看windows的网络适配器界面,发现有多个网口,如图:
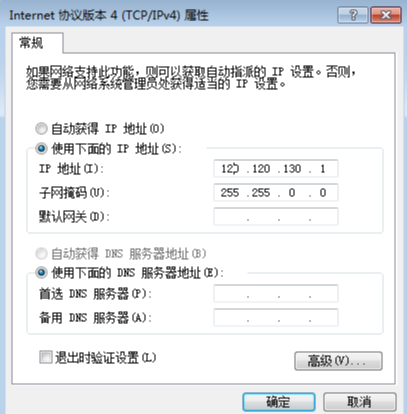
分别查看IPv4属性:
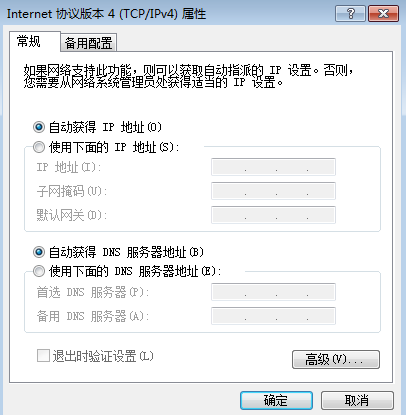
发现是自动获取IP地址。这时,我们可以初步推断——找不到相机是IP地址冲突引起的。
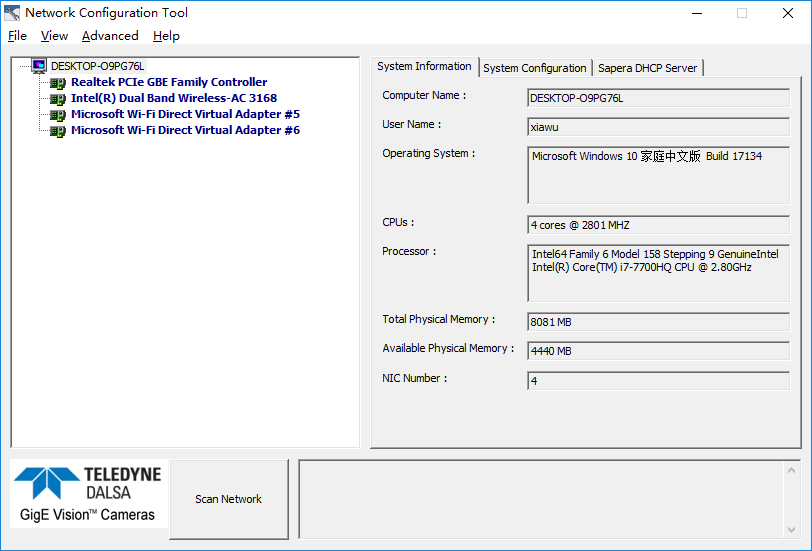
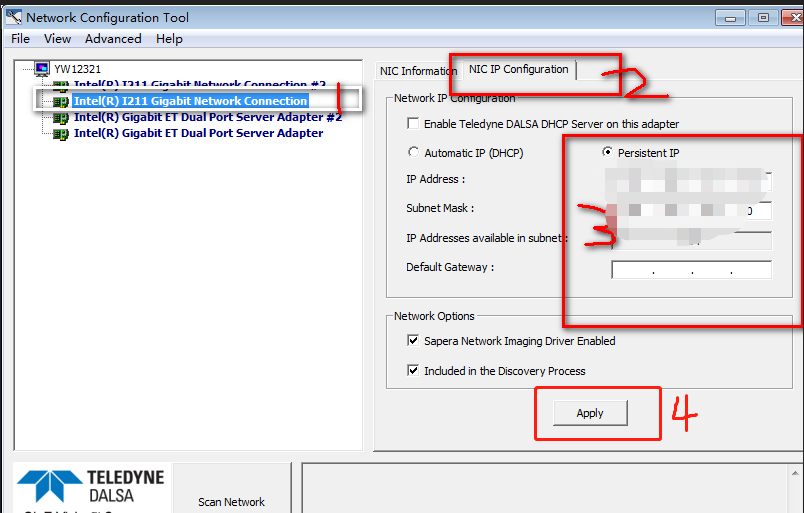
接下来,打开dalsa的网络配置助手Network Configuration Tool ,打开界面如下:
,打开界面如下:
然后,我们点击Scan NetWork在相应网口下找到dalsa相机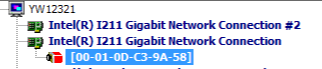 ,此时相机由于未连接成功,所以是红色的状态。我们可以在右边的菜单栏中获取到当前相机配置的IP信息。
,此时相机由于未连接成功,所以是红色的状态。我们可以在右边的菜单栏中获取到当前相机配置的IP信息。
当然,此时的 按钮是非使能状态的(相机未连接成功嘛)。
按钮是非使能状态的(相机未连接成功嘛)。
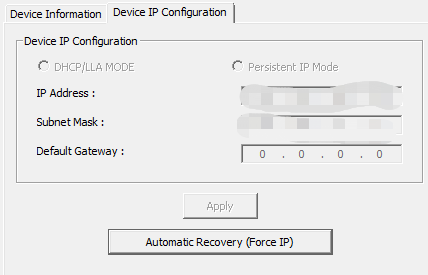
下一步当然是要设置好网口的IP属性,使其与相机的IP属性匹配,这样才能找得到相机:
一切设置完毕之后,可以再次扫描网络,这时发现相机的状态变为蓝色的正常状态了。说明此时可以正常地连接相机了。
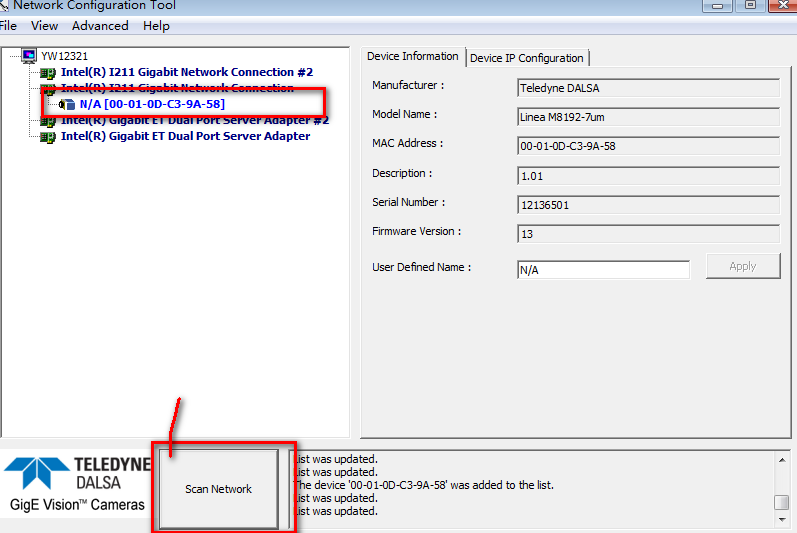
到此为止,相机成功连接。
其它问题:
>. 跟我情况一样,有多个网口,且都是自由分配IP。查看了相机的IP,是196.254.xx.xx。
由于这种IP的普遍,不冲突都对不起它自己。。。这种情况,最最简单的解决办法就是——拔掉多余的网线,只留下相机的网线。然后进行配置,最终成功。
>. 但是问题又来了,本来我已经配置OK了。但是,突然想起来还有俩网线被我拔掉了,ok,只好再插上去。over~~~发现相机又连接失败了! 哎,反正这个标志就很烦。
哎,反正这个标志就很烦。
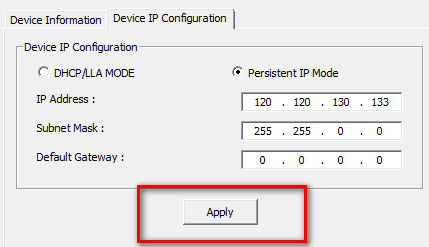
解决方法:拔掉网线,趁着相机还能正常连接的时候,赶紧把相机的IP设置为一个冷门的IP地址,然后相应的设置好插相机千兆网的那个网口的IP。记住,要冷门的~~~具体操作,看图:
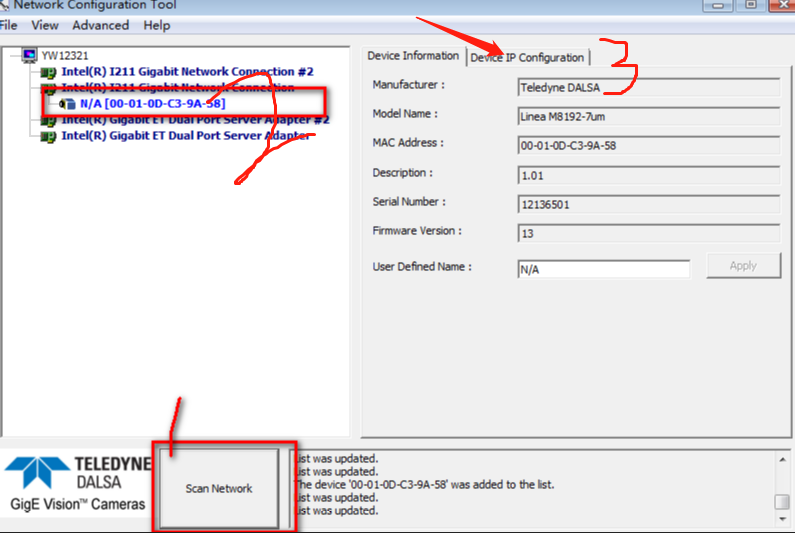
点进去,设置:
接下来设置IPv4的属性:
最后, 重新检查一下,发现一切都还ok。So,终于可以插上那两根恶心的网线了。
重新检查一下,发现一切都还ok。So,终于可以插上那两根恶心的网线了。
注:Dalsa相机的IP只有连接上之后才能进行配置。