本文提供一种可以解析CAN信号各信号值的一种方法并进行说明。
一般情况下,高端一点的设备会计算每一个信号的值,但是接受到CAN信号的报文实际上有各种情况,如何通过设定的起始位和数据长度来获取某一信号的值,详情请参考,本文方法比较笨拙,如有更好的办法,欢迎指教。
假设,我们获取到的数据长度为8byte,即DLC为8。CAN Matrix表格如下:
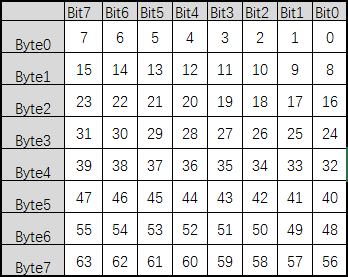
我们约定,一种表示信号的方式如下:
- lsb起始位
- 数据长度
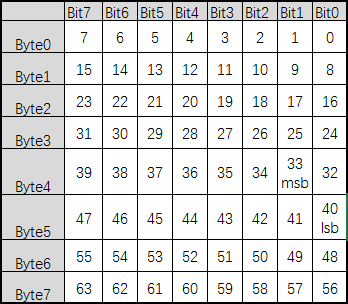
按照上面的图来说,该信号起始位为40,长度为10。所以,该信号表示值的范围在0-1023之间,至于具体表示的物理量的含义需要有其他的文件规定。
获取到一帧数据以后,如何通过一系列的运算来得到信号值呢?
这里提供一种思路:
- 根据起始位和长度信息确定信息跨越的byte位
- 根据起始位确定LSB所在的bit位
- 根据跨越的byte位组合为数据
- 把以上组合的数据进行位与,得到信号值。
大概分为以上的4部分,以下分别说明:
设定:lsbbit,lsbbyte,msbbyte,start,length.按照以上的例子就是:
- lsbbit = 0
- lsbbyte = 5
- msbbyte = 4
- start = 40
- length = 10
计算lsbbit:
lsbbit = start & 7
计算lsbbyte:
lsbbyte = start >> 3
计算msbbyte:
由于数据是向byte减少的方向进行的。所以:
msbbyte = lsbbyte - x
x为跨越的位数,也就是:lsbbit + length - 1所占的长度,如果大于7说明为另一行,即:
msbbyte = lsbbyte - ((lsbbit + length - 1) >> 3)
组合data:
我们知道数据介于msbbyte-lsbbyte之间,那么我们可以组合这两个数据:
for(index = msbbyte -> (lsbbyte+1)):
data_merge += data[index] << (( lsbbyte - index ) << 3)
获取数据value:
去尾:value = data_merge >> lsbbit
按位与:value = value & ((1 << length) - 1)
所以,最终得到的结果为筛选出来的信号值,然后根据该信号值关联上实际的物理值,就可以得到具体的物理数据了。
代码实现的方式有很多,大体思路为此。
很久以前写的,今天用的时候居然发现了一个bug,所以记录下来,表示注意。