板载按键KEY
1.获取板载按键引脚名称
>>> help(pyb.Pin.board) object <class 'board'> is of type type ... SW -- Pin(Pin.cpu.B3, mode=Pin.IN, pull=Pin.PULL_UP) ...
板载用户按键别名:SW,芯片定义的名称是B3.
2.获取Switch类里面的方法
>>> help(pyb.Switch) object <class 'Switch'> is of type type value -- <function> callback -- <function>
3.基本用法
>>> switch = pyb.Switch() #构造一个Switch的对象 >>> switch() #等价于switch.value() False >>> switch() True >>> switch.value() #获取按键当前状态,True表示按下,False表示没有按下 False >>> switch.value() True >>> switch.callback(lambda:pyb.LED(1).toggle()) #匿名函数 >>> def toggle_led(): #定义用于回调的函数 ... if switch.value(): ... pyb.delay(10) ... if switch.value(): ... pyb.LED(2).toggle() ... while switch.value():pass ... ... ... >>> switch.callback(toggle_led) #此处用于回调的函数里面是没有括号的
switch.callback()是回调函数,功能类似C语言里的中断函数,当按下按键时将自动执行这个回调函数。
在pyboard中,只定义了一个用户按键。如果开发板上有多个按键,就需要自己去控制,而不能使用pyb.Switch()了。具体方法学习下面GPIO知识点就会了。
GPIO的使用
按键和LED其实就代表了GPIO的两种最基本的使用方法:输入和输出,下面就完整地介绍GPIO的使用。
首先我们需要导入pyb中的Pin模块,然后就可以定义一个Pin对象,及其使用的引脚和功能。
获取Pin类里面的方法和相关的类
>>> help(pyb.Pin) object <class 'Pin'> is of type type init -- <function> value -- <function> off -- <function> on -- <function> irq -- <function> low -- <function> high -- <function> name -- <function> names -- <function> af_list -- <function> port -- <function> pin -- <function> gpio -- <function> mode -- <function> pull -- <function> af -- <function> mapper -- <classmethod> dict -- <classmethod> debug -- <classmethod> board -- <class 'board'> cpu -- <class 'cpu'>
构造一个X1引脚的实例以及相关的操作方法
>>> x1 = pyb.Pin('X1') >>> x1 Pin(Pin.cpu.A0, mode=Pin.IN) >>> x1.init(pyb.Pin.OUT) >>> x1 Pin(Pin.cpu.A0, mode=Pin.OUT) >>>
上面代码中,x1就是Pin类的一个实例或者叫做一个对象,'X1'是这个GPIO的别名,它的芯片定义的名称是Pin.cpu.A0也就是'A0'。我们使用这个Pin类里面的方法,x1.init(pyb.Pin.OUT)引脚的初始化操作也就是将引脚设置成输入或输出。
在MicroPython中,可以用init()函数的功能:将GPIO设置输入或者输出模式,其中的输入可以设置内部的上拉下拉电阻状态,而输出还可以设置推挽方式输出和开漏输出:
>>> x1.init(pyb.Pin.OUT_PP) #设置为推挽方式输出 >>> x1.init(pyb.Pin.OUT_OD) #设置为开漏方式输出 >>> x1.init(pyb.Pin.IN) #设置为输入 >>> x1.init(pyb.Pin.IN,pull=pyb.Pin.PULL_UP) #设置为输入并使用内部上拉电阻
>>> x1.init(pyb.Pin.IN,pull=pyb.Pin.PULL_DOWN) #设置为输入并使用内部下拉电阻
上面的Pin可以用from pyb import Pin导入,这样子做的好处:使代码简洁。
>>> from pyb import Pin >>> x1 = Pin('A0') >>> x1 Pin(Pin.cpu.A0, mode=Pin.IN) >>> x1.init(Pin.OUT_PP) >>> x1 Pin(Pin.cpu.A0, mode=Pin.OUT) >>> x1.init(Pin.IN) >>> x1 Pin(Pin.cpu.A0, mode=Pin.IN) >>> x1.init(Pin.IN,Pin.PULL_UP) >>> x1 Pin(Pin.cpu.A0, mode=Pin.IN, pull=Pin.PULL_UP) >>>
需要下拉电阻时设置pull参数为:pull=PULL_DOWN,而不需要上拉下拉电阻时就设置pull=PULL_NONE。
上面是将 GPIO 的定义和模式分开设置的,这样比较好理解。但是通常情况下,我们会将它们放在一起定义,这样更加简洁高效,如:
>>> from pyb import Pin >>> x1 = Pin(Pin.cpu.A0,Pin.OUT_PP) >>> x1 Pin(Pin.cpu.A0, mode=Pin.OUT) >>> x1 = Pin(Pin.cpu.A0,Pin.IN,pull=Pin.PULL_UP) >>> x1 Pin(Pin.cpu.A0, mode=Pin.IN, pull=Pin.PULL_UP)
对于GPIO的输出值(1/0)我们可以控制其高低电平,而输入是不可以的(除非你设置它的内部上拉电阻和下拉电阻):
>>> x1 = Pin('X1',Pin.IN) >>> x1 Pin(Pin.cpu.A0, mode=Pin.IN) >>> x1.high() >>> x1 Pin(Pin.cpu.A0, mode=Pin.IN) >>> x1.value() 0 >>> x1.init(Pin.OUT) >>> x1 Pin(Pin.cpu.A0, mode=Pin.OUT) >>> x1.high() >>> x1.value() 1
GPIO的输入测试部分
>>> x5 = Pin('X5',Pin.IN) >>> x5.value() 0 >>> x5.value() 1 >>> x5.value() 0 >>> x5.value() 0 >>> x5.value() 0 >>> x5.value() 0 >>> x5.value() 0 >>> x5.value() 0 >>> x5.value() 1 >>> x5.value() 0 >>> x5.init(Pin.IN,pull=Pin.PULL_UP) >>> x5() 1 >>> x5() 1 >>> x5() 1 >>> x5() 1 >>> x5() 1 >>> x5() 1 >>> x5() 1 >>> x5() 1 >>> x5.init(Pin.IN,pull=Pin.PULL_DOWN) >>> x5() 0 >>> x5() 0 >>> x5() 0 >>> x5() 0 >>> x5() 0 >>> x5.init(Pin.IN,pull=Pin.PULL_NONE) >>> x5() 0 >>> x5() 0 >>> x5() 0 >>> x5() 0 >>> x5() 0 >>> x5() 0 >>> x5() 1 >>> x5() 0 >>> x5() 1 >>> x5() 0
结论:对于输入模式下的通用输入引脚(Pin.IN)的电平状态是不确定的,而使用上拉电阻时电平状态一直是高电平状态,使用下拉电阻时就一直是低电平,而Pin.PULL_NONE和通用输入是一样的,引脚的电平状态也无法确定。(高阻态)
GPIO的输出测试部分
>>> x5 = Pin('X5',Pin.OUT) >>> x5 Pin(Pin.cpu.A4, mode=Pin.OUT) >>> x5() 0 >>> x5() 0 >>> x5() 0 >>> x5() 0 >>> x5() 0 >>> x5() 0 >>> x5() 0 >>> x5() 0 >>> x5() 0 >>> x5() 0 >>> x5() 0 >>> x5.init(Pin.OUT_PP) >>> x5 Pin(Pin.cpu.A4, mode=Pin.OUT) >>> x5() 0 >>> x5() 0 >>> x5() 0 >>> x5() 0 >>> x5() 0 >>> x5() 0 >>> x5.high() >>> x5() 1 >>> x5.low() >>> x5() 0 >>> x5.on() >>> x5() 1 >>> x5.off() >>> x5() 0 >>> x5.init(Pin.OUT_OD) >>> x5 Pin(Pin.cpu.A4, mode=Pin.OPEN_DRAIN) >>> x5() 0 >>> x5.high() >>> x5() 1 >>> x5() 0 >>> x5() 0 >>> x5() 0 >>> x5() 0 >>> x5() 0 >>> x5() 1 >>> x5() 0 >>> x5() 0 >>> x5() 1 >>> x5() 0 >>> x5() 0 >>> x5() 0
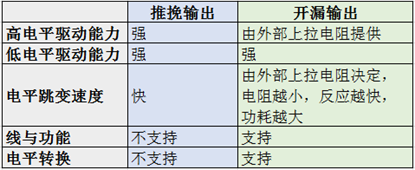
结论:GPIO输出模式通用模式时的输出电平一直为低电平,相关输出操作方法(GPIO输出相关的方法:x1.high()、x1.low()、x1.on()、x1.off())也是可以直接使用的,但是在开漏模式下输出引脚的电平状态是不确定的,需要外接一个上拉电阻,才可以输出稳定的高电平。
推挽输出:可以输出高、低电平。
开漏输出:输出端相当于三极管的集电极,要得到稳定的电平状态只能是依靠上拉电阻得到稳定的高电平,电压取决于你的上拉电阻,所有好处是可以输出可以调节的电压。
像上面电平一直浮动的状态叫做高阻态。
详细说明地址:推挽输出和开漏输出
引脚中断的方法:
Pin.irq(handler=None, trigger=(Pin.IRQ_FALLING | Pin.IRQ_RISING), priority=1, wake=None, hard=False)
中断相关资料地址:https://www.cnblogs.com/iBoundary/p/11508565.html
对于GPIO的引脚电平状态我们可以使用value()或者直接x1()读取
af,当mode是Pin.AF_PP或Pin.AF_OD时,可以选择第二功能索引或名称
af_list()
返回GPIO的第二功能列表,如:
>>> pyb.Pin.af_list(pyb.Pin('X1')) [Pin.AF1_TIM2, Pin.AF1_TIM2, Pin.AF2_TIM5, Pin.AF3_TIM8, Pin.AF7_USART2, Pin.AF8_UART4]
通过这个函数,我们可以具体查看一个GPIO有哪些第二功能。
af()
返回GPIO第二功能索引值,如果没有使用第二功能将返回0,否则返回实际的索引值。
注意这个索引值并不是对应af_list()函数返回的列表,而是控制器手册中的第二功能映射表。PYB V10使用的控制器是STM32F405RG,可以参考它的数据手册第61页的“Table 9.Alternate function mapping”。
如,PA11是AF10_OTG_FS_DM功能:
>>> pyb.Pin.af_list(pyb.Pin('A11')) [Pin.AF1_TIM1, Pin.AF7_USART1, Pin.AF9_CAN1] >>> pyb.Pin.af(pyb.Pin('A11')) 10
SC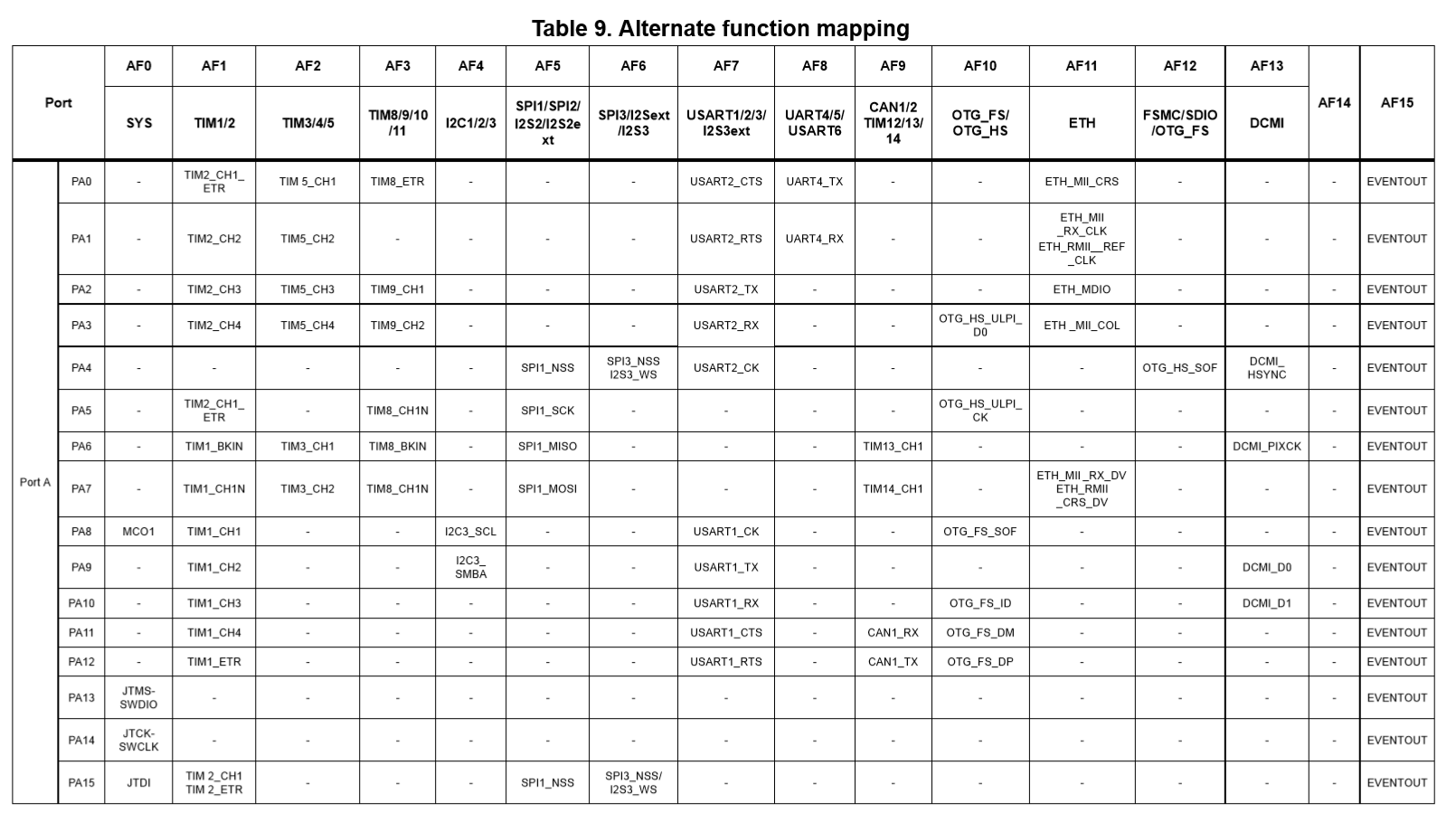
手册地址:https://www.st.com/resource/en/datasheet/stm32f405rg.pdf
gpio()
当前GPIO关联寄存器的基本地址。
mode()
设置或获取GPIO的模式,mode含义可以参考init()函数中相关参数的说明。
name()
返回GPIO的名称。
names()
返回GPIO和别名。
pin()
返回引脚在端口中的序号。
port()
返回端口序号。
>>> sw.port()
1端口A的序号是0,端口B的序号是1,端口C的序号是2,以此类推。按键sw对应的引脚是B3,因此返回值是1。
pull()
引脚的上拉状态。具体参数含义参考init()函数中pull参数。