1. SPI总线简介
SPI全称串行外设接口,是一种高速,全双工,同步的外设总线;它工作在主从方式,常规需要至少4根线才能够正常工作。SPI作为基本的外设接口,在FLASH,EPPROM和一些数字通讯中,具有广泛的应用。SPI总线由四个接口构成:
CS :片选端,由主设备控制
MISO:主设备输入,从设备输出
MOSI:主设备输出,从设备输入
SCK :时钟信号
其中SCK仅能由主设备提供,且接收和发送和同时产生的,因此在主设备接收数据时也要先发送数据从而为从设备提供时钟;根据SPI时钟信号配置相关说明,SPI的时钟相位和极性由CPOL和CPHA两位控制共有四种不同的工作时序。
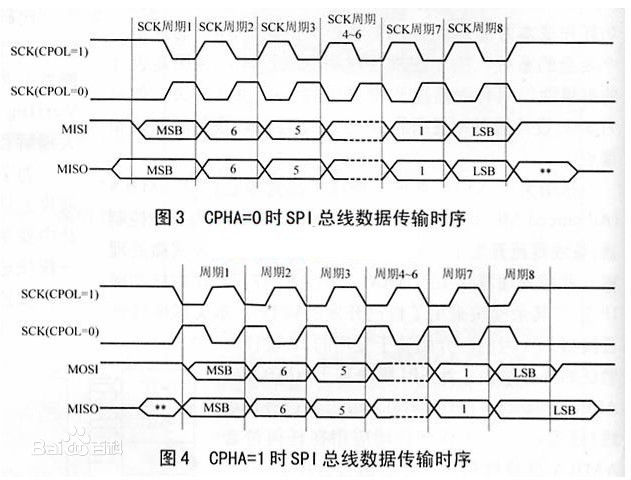
其中CPOL:0 空闲状态低电平 1 空闲时候高电平
CPHA: 0 第一个边沿采样 1 第二个边沿采样
2. 工作原理图
了解了SPI总线,下面就开始进入正题,通过SPI总线操作外部flash(W25X16)。首先确定开发板原理图对应的端口连接:

从上可以得出 CS:PB9 SCK:PA5
MISO:PA6 MOSI:PA7
不过因为开发板的资源有限,SD卡和外部flash共用SPI总线,因此在读取SPI FLASH之前要关闭SD卡的片选端,避免出现总线冲突。
了解了这些,就可以开始SPI_FLASH驱动硬件部分的编写了。
3. SPI硬件驱动
SPI端口配置比较简单,主要包含端口时钟启动,端口功能配置,初始化即可
GPIO_InitTypeDef GPIO_InitStructure; RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_GPIOB |RCC_APB2Periph_GPIOD |RCC_APB2Periph_AFIO, ENABLE); /*SD_CS Disable PD11*/ GPIO_InitStructure.GPIO_Pin =SD_CS_Pin; GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz; GPIO_InitStructure.GPIO_Mode =GPIO_Mode_Out_PP; GPIO_Init(SD_CS_Port, &GPIO_InitStructure); GPIO_SetBits(SD_CS_Port, SD_CS_Pin); /*SPI1_CS 端口配置*/ GPIO_InitStructure.GPIO_Pin =SPI1_CS_Pin; GPIO_Init(SPI1_CS_Port, &GPIO_InitStructure); SPI1_CS_Disable(); /*SPI1_SCK 端口配置*/ GPIO_InitStructure.GPIO_Pin =SPI1_SCK_Pin; GPIO_InitStructure.GPIO_Mode =GPIO_Mode_AF_PP; GPIO_Init(SPI1_SCK_Port, &GPIO_InitStructure); /*SPI1_MISO 端口配置*/ GPIO_InitStructure.GPIO_Pin =SPI1_MISO_Pin; GPIO_Init(SPI1_MISO_Port, &GPIO_InitStructure); /*SPI1_MOSI 端口配置*/ GPIO_InitStructure.GPIO_Pin =SPI1_MOSI_Pin; GPIO_Init(SPI1_MOSI_Port, &GPIO_InitStructure);
SPI功能配置主要包含上面我提到的主从设备,时钟相位和极性,发送数据长度和顺序(STM32本身集成功能,与SPI本身关系不大)等,具体配置如下:
SPI_InitTypeDef SPI_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_SPI1 |RCC_APB2Periph_AFIO, ENABLE);
SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex; //SPI工作在双向双线模式
SPI_InitStructure.SPI_Mode = SPI_Mode_Master; //CPU的SPI工作在主机模式
SPI_InitStructure.SPI_DataSize = SPI_DataSize_8b; //SPI传输数据帧长度为8字节
SPI_InitStructure.SPI_CPOL = SPI_CPOL_High; //空闲时SCK高电平 MODE3模式
SPI_InitStructure.SPI_CPHA = SPI_CPHA_2Edge; //第二个下降沿接收/发送数据
SPI_InitStructure.SPI_NSS = SPI_NSS_Soft; //启用软件从设备管理
SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_4; //波特率为Pclk2/4
SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB; //高位先发送
SPI_InitStructure.SPI_CRCPolynomial = 7; //默认CRC校验多项式 x^2+x+1
SPI_Init(SPI1, &SPI_InitStructure);
SPI_Cmd(SPI1, ENABLE); STM32因为SPI总线已经集成在CPU内部,因此配置起来十分简单,仅修改部分寄存器就可以实现对于SPI总线的配置,用于操作外部设备,不过涉及到外部设备的通讯并没有这么简单,这涉及读取和操作芯片的时序和指令,下面我以开发板上的W25X16外部flash为例,讲解SPI总线的实际运用。
4. SPI总线操作W25X16
外部flash的操作比较简单,总结起来仅读寄存器,写寄存器,读数据,写数据,擦除数据,读ID这6种工作模式,如W25X16指令表如下:
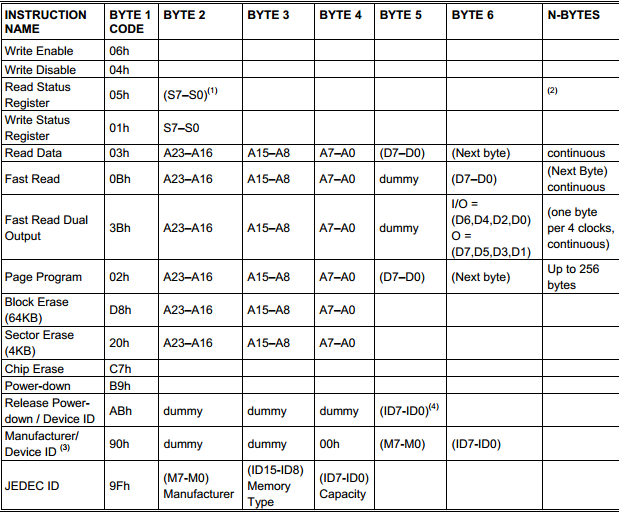
参照该表,程序中就可以有如下flash操作指令定义


/*外部flash相关指令*/
#define Flash_WriteEnable 0x06
#define Flash_WriteDisable 0x04
#define Flash_ReadStatusReg 0x05
#define Flash_WriteStatusReg 0x01
#define Flash_ReadData 0x03
#define Flash_FastReadData 0x0B
#define Flash_FastReadDual 0x3B
#define Flash_PageProgram 0x02
#define Flash_BlockErase 0xD8
#define Flash_SectorErase 0x20
#define Flash_ChipErase 0xC7
#define Flash_PowerDown 0xB9
#define Flash_ReleasePowerDown 0xAB
#define Flash_ManufactDeviceID 0x90
#define Flash_JedecDeviceID 0x9F
#define Flash_NoBusy 0xA5 可以看出外部flash主要包含擦除,读寄存器,写入寄存器,读数据,写数据,读ID这几种方式。
(1). flash单字节收发
根据上面SPI总线的说明,SPI的写入和读出是同时发生的,且时钟只能由主设备提供,因此SPI总线的收发由同一个函数完成。如下:
/*等待SPI发送数据寄存器为空时,发送1字节数据*/
while (SPI_I2S_GetFlagStatus(SPI1, SPI_I2S_FLAG_TXE) ==RESET)
{
}
SPI_I2S_SendData(SPI1, byte);
/*在发送数据同时,SPI_MISO引脚会读取管脚数据,等待读取寄存器非空*/
while (SPI_I2S_GetFlagStatus(SPI1, SPI_I2S_FLAG_RXNE) ==RESET)
{
}
return SPI_I2S_ReceiveData(SPI1);当然,实际项目中在while循环内部需要添加超时时钟,避免因为可能出现的SPI硬件出错而导致整个系统停止的问题。
(2). flash擦除
外部flash的擦除主要包含sector(扇区)擦除,block(块)擦除,chip(整片)擦除。其中扇区擦除4kb, 块擦除64kb, flash的擦除按照芯片资料上要求,擦除需要3步:
1.写入允许(0x06)
2.擦除指令(0x20)
3. 写入擦除地址(24bit), 分三次发送
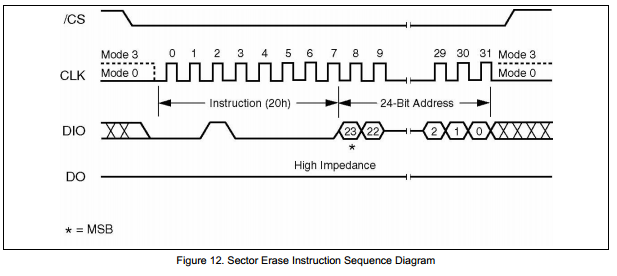
由时序可知,擦除片代码如下:
voidSPI_EraseSector(u32 SectorAddress)
{
SectorAddress = (SectorAddress>>12)<<12; //确定擦除块的首地址
SPI_Write_Enable(); //允许写入
SPI1_CS_Enable();
SPI_SendWrite_Byte(Flash_SectorErase); //写入擦除指令
/*写入带擦除的扇区*/
SPI_SendWrite_Byte((SectorAddress&0xFF0000)>>16);
SPI_SendWrite_Byte((SectorAddress&0xFF00)>>8);
SPI_SendWrite_Byte(SectorAddress&0xFF);
SPI1_CS_Disable();
SPI_WaitWriteEnd();
}(3). 数据读取
数据读取包含3步,1.写入读取指令 2.写入待读取数据地址 3.读取flash内部数据。如此便完成外部flash的读取。
void SPI_Read(u8 *pBuffer,u32 ReadAddress,u16 ReadByteNum)
{
SPI1_CS_Enable();
SPI_SendWrite_Byte(Flash_ReadData); //写入读取指令
SPI_SendWrite_Byte(ReadAddress >> 16); //写入待读取数据地址
SPI_SendWrite_Byte(ReadAddress >> 8);
SPI_SendWrite_Byte(ReadAddress);
/*读取数据*/
while(ReadByteNum--)
{
*pBuffer =SPI_SendWrite_Byte(Flash_NoBusy);
pBuffer++;
}
SPI1_CS_Disable();
}(4)数据写入
数据写入包含4步,1.写入允许 2.写入数据写入指令 3.写入数据存储地址 4.写入数据。如此便完成外部flash的写入。
void SPI_PageWrite(u8 *pBuffer, u32 PageAddress,u16 WriteByteNum)
{
SPI_Write_Enable(); //写入允许
SPI1_CS_Enable();
SPI_SendWrite_Byte(Flash_PageProgram); //写入存储指令
SPI_SendWrite_Byte(PageAddress >> 16); //写入存储地址
SPI_SendWrite_Byte(PageAddress >> 8);
SPI_SendWrite_Byte(PageAddress);
if(WriteByteNum > 256)
{
WriteByteNum = 256;
printf("Err: SPI_PageWrite too large!");
}
/*写入数据*/
while(WriteByteNum--)
{
SPI_SendWrite_Byte(*pBuffer);
pBuffer++;
}
SPI1_CS_Disable();
SPI_WaitWriteEnd();
}(5)ID读取
ID读取比较简单,主要用来测试硬件是否成功,具体代码如下
u32 SPI_ReadID(void)
{
u32 ID_Temp,temp_h,temp_m,temp_l;
SPI1_CS_Enable();
SPI_SendWrite_Byte(Flash_JedecDeviceID);
temp_h =SPI_SendWrite_Byte(Flash_NoBusy);
temp_m =SPI_SendWrite_Byte(Flash_NoBusy);
temp_l =SPI_SendWrite_Byte(Flash_NoBusy);
SPI1_CS_Disable();
ID_Temp = (temp_h << 16)|(temp_m << 8)|temp_l;
returnID_Temp;
} 上面便是SPI总线基本操作了,具体可参考代码:
http://files.cnblogs.com/files/zc110747/6.SPI-Flash.7z
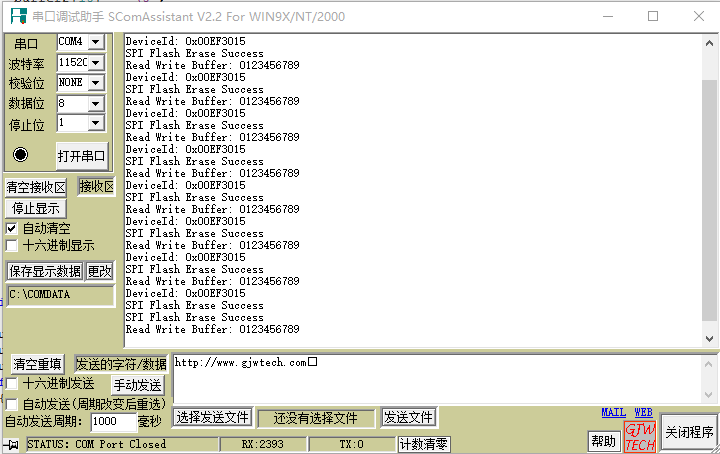
根据代码中设计以及通过串口输出如下图,可以判断成功实现了SPI-flash的读,写和擦除的工作。