视觉里程计的主要问题是如何根据图像来估计相机运动,VO的实现方法,按照是否需要提取特征,分为特征点法的前端以及不提取特征的直接法前端。基于特征点法的前端,长久以来被认为是视觉里程计的主流方法,它运行稳定,对光照、动态物体不敏感,是目前较为成熟的解决方案。
计算机视觉邻域的研究者们,设计了许多比角点更加稳定的局部图像特征,比如SIFT,SURF,ORB等。特征点由关键点(Key-point)和描述子(Descriper)两部分组成。SIFT(Scale Invariant Feature Transform 尺度不变特征变换)计算量大,普通 PC 的 CPU还无法实时地计算 SIFT 特征,进行定位与建图。所以在 SLAM 中我们甚少使用这种“奢侈”的图像特征。ORB(Oriented FAST and Rotated BRIEF)特征则是目前看来非常具有代表性的实时图像特征。它改进了 FAST 检测子 不具有方向性的问题,并采用速度极快的二进制描述子BRIEF,使整个图像特征提取的环节大大加速。
根据匹配点对,估计相机运动
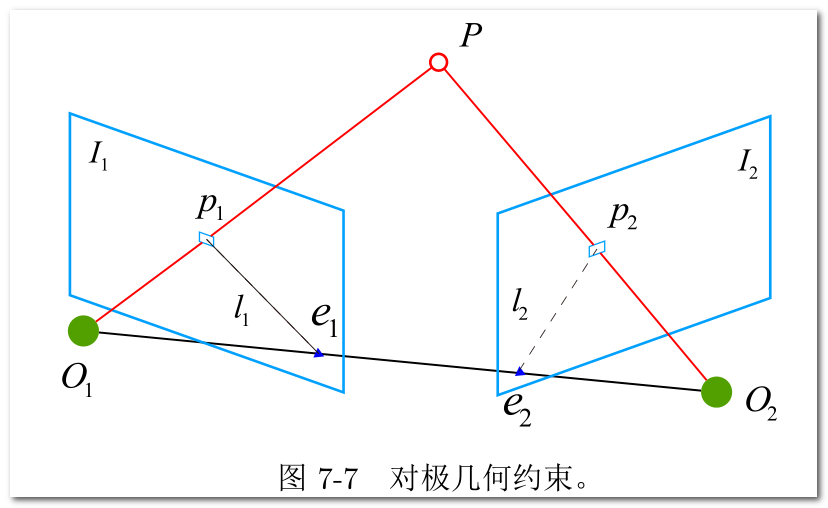
1. 当相机为单目时,我们只知道 2D 的像素坐标,因而问题是根据两组 2D 点估计运动。该问题用对极几何来解决。
2. 当相机为双目、RGB-D 时,或者我们通过某种方法得到了距离信息,那问题就是根据两组 3D 点估计运动。该问题通常用 ICP 来解决。
3. 如果我们有 3D 点和它们在相机的投影位置,也能估计相机的运动。该问题通过 PnP求解。
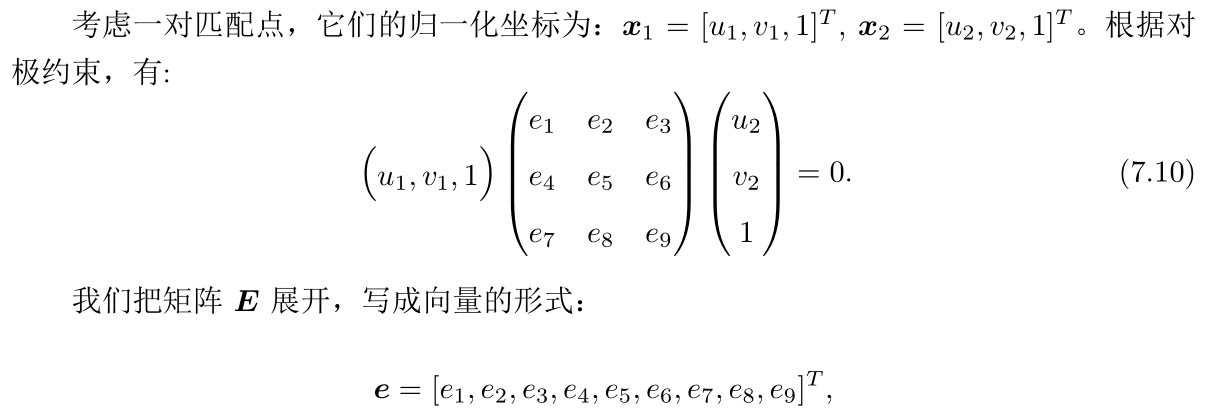
2D-2D对级几何

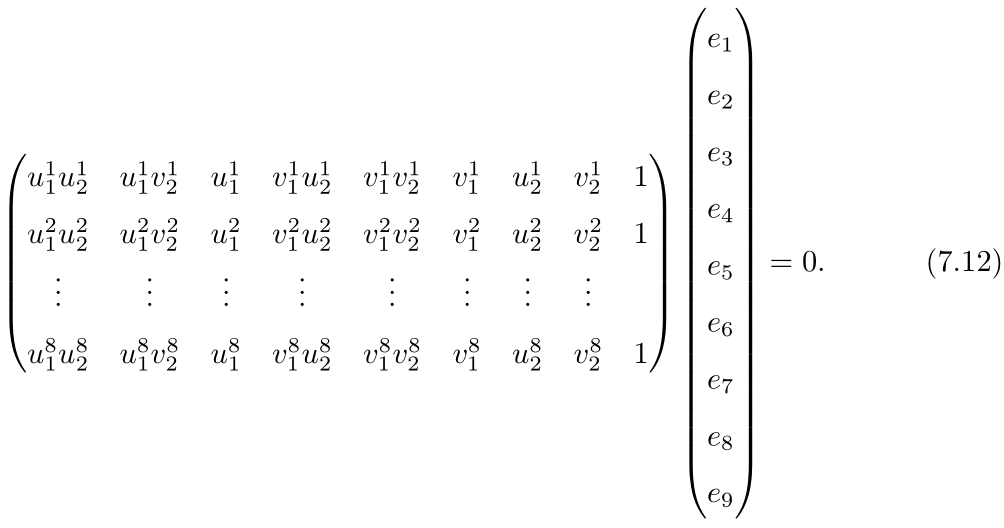
本质矩阵E由于满足对级约束,所以E满足尺度等价性,矩阵E具有5个自由度,表明我们可以最少使用5对点来计算E矩阵,但是E的内在非线性性质使得求解线性方程时比较麻烦。可使用经典的8点法在线性框架下求解。
求得E后,根据奇异值分解,恢复相机的R,t
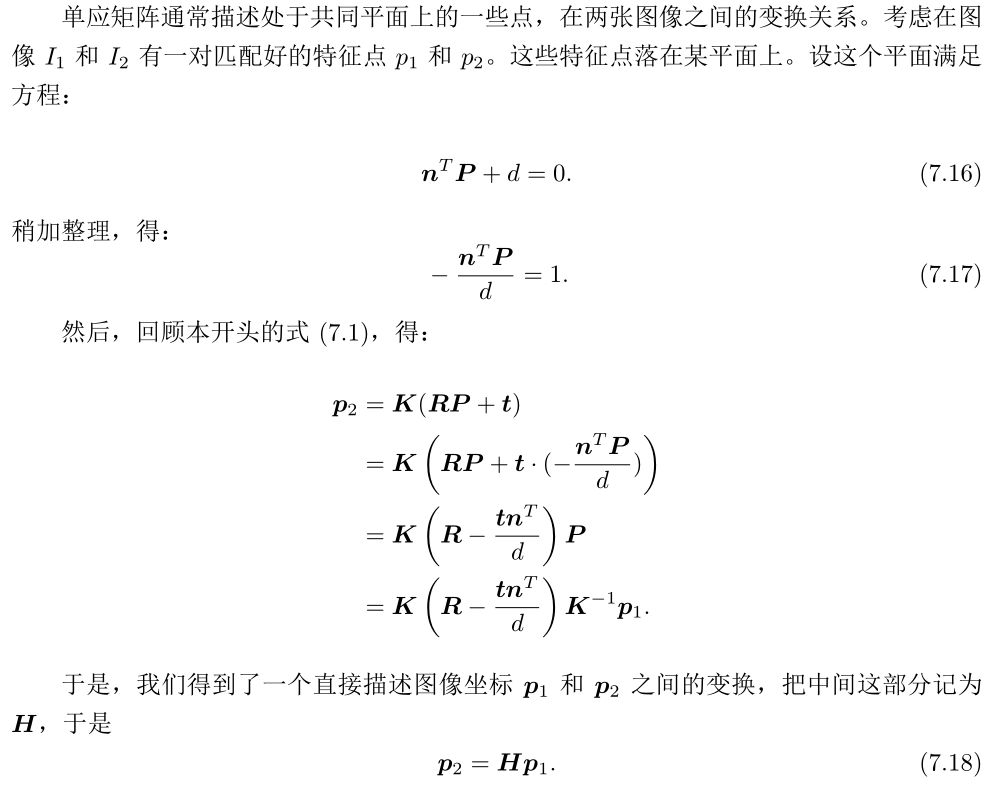
单应矩阵H
单应矩阵描述了两个平面之间的映射关系,如果场景中的特征点都位于同一平面上,则可以通过单应性来进行运动估计。
openCV相关函数:
findFundamentalMat() 计算基础矩阵
findEssentialMat() 计算本质矩阵
findHomography() 计算单应矩阵
recoverPose() 从本质矩阵中恢复旋转和平移
triangulatePoints() 通过三角化计算空间点位置
3D:2D PnP
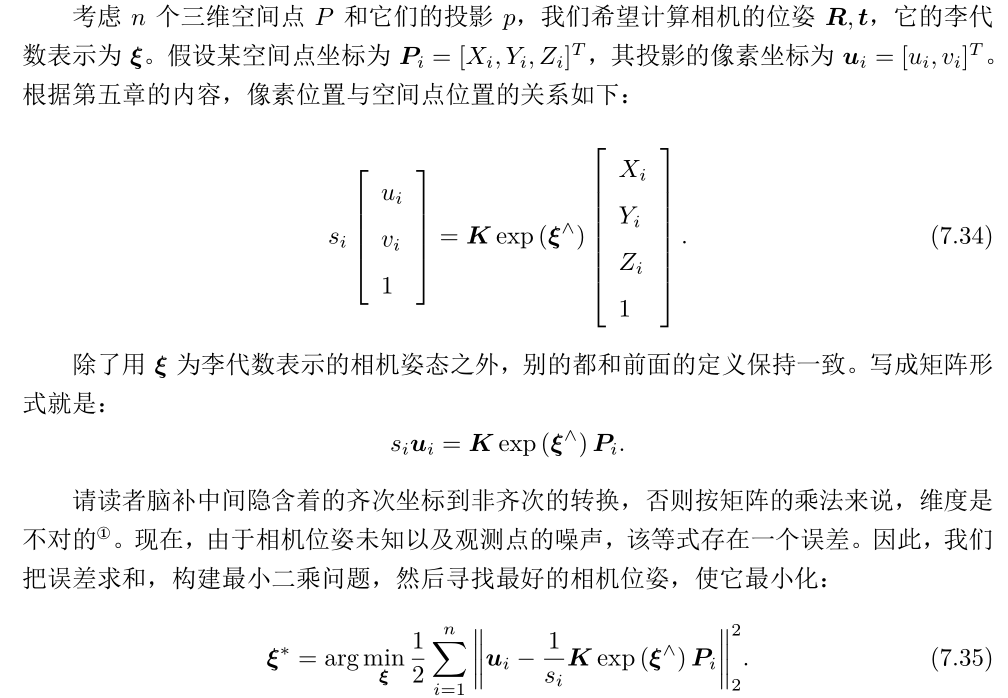
PnP(Perspective-n-Point)描述了当我们知道了n个3D空间点以及它们的投影位置时,如何估计相机所在的位姿。PnP不需要使用对极约束,可以在很少的匹配点中获得较好的运动估计,是一种重要的姿态估计方法。
PnP求解有很多求解方法,如仅用三对点估计的P3P,直接线性变换DLT,非线性优化Bundle Adjustment。SLAM中通常的做法是先使用P3P/EPnP等方法估计相机位姿,然后构建最小二乘优化问题对估计值进行调整(Bundle Adjustment)
Bundle Adjustment
Bundle Adjustment是一个最小化重投影误差的问题,同时对位姿和空间点进行优化。
openCV相关函数:
solvePnP() Finds an object pose from 3D-2D point correspondences. This function returns the rotation and the translation vectors that transform a 3D point expressed in the object coordinate frame to the camera coordinate frame.
3D-3D ICP
可采用SVD方法以及非线性优化方法