该部分可参照github Autoware中的 Demo Quick_Start。
1. 建立目录“.autoware”来保存demo数据
mkdir .autoware
2. 下载Demo数据下载demo数据:
A script for generating a demo launch file: http://db3.ertl.jp/autoware/sample_data/my_launch.sh Map/calibration/path data (Moriyama area): http://db3.ertl.jp/autoware/sample_data/sample_moriyama_data.tar.gz rosbag data: http://db3.ertl.jp/autoware/sample_data/sample_moriyama_150324.tar.gz
将下载的压缩包转到~/.autoware解压
~$ cd .autoware~/.autoware$ tar xfz sample_moriyama_data.tar.gz ~/.autoware$ tar xfz sample_moriyama_150324.tar.gz~/.autoware$ sh my_launch.sh
运行命令后会生成以下的launch文件:
my_launch/
my_map.launch # Load PointClouds and vector maps
my_sensing.launch # Load device drivers
my_localization.launch # Localozation
my_detection.launch # Object detection
my_mission_planning.launch # Path planning
my_motion_planning.launch # Path following 3. 运行runtime manager
cd ~/Autoware/ros
./run如出现输入密码后无Runtime Manager窗口,应该是Autoware安装有问题,可能是未执行:
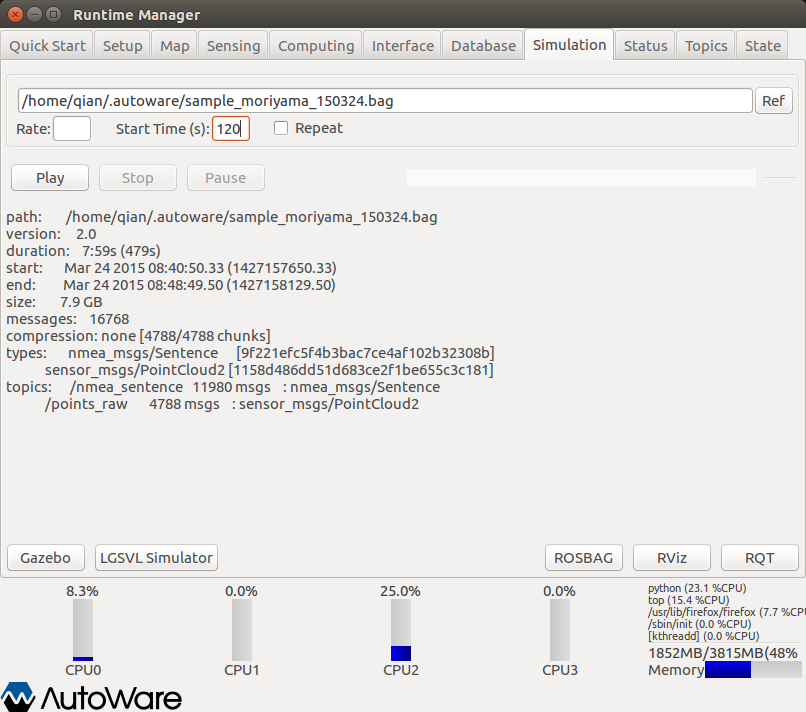
4. 运行rosbag
在Runtime Manager的simulation界面中,导入”sample_moriyama_150324.bag”,设置开始时间为120,然后点击play,再点击pause按钮。
加载点云图和向量图
在[quick start]界面,选择map,ref加载my_map.launch,并且点击[map]按钮。
“~/.autoware/data/my_launch/my_map.launch”
定位
在[quick start]界面,加载my_localization.launch,并且点击[localization]按钮。
“~/.autoware/my_launch/my_localization.launch”
启动RViz
点击RViz按钮启动Rviz可视化工具。启动后选择[file]-[open config],在[choose a file to open]对话框中,选择以下文件,然后点击[open]。
“~/Autoware/ros/src/.config/rviz/default.rviz”
在[simulation]界面,点击[pause]按钮来重新运行rosbag。
在Rviz中的 [Display]窗口, [Global Options]-[Fixed Frame] , 设置为 “world”.
在 [Current View]-[Target Frame]的 [View] 窗口, 选择“base_link” 并且设置[Type]为“TopDownOrtho”。点击 [Zero] 按钮. (可以初始化追踪汽车的位置)。
当simulation界面的进度条到达23%左右(110/479sec),演示应该趋向于稳定了。
8.任务规划
在[quick start]界面,加载my_mission_planning.launch,并且点击[mission planning]按钮。
“~/.autoware/my_launch/my_mission_planning.launch”
9.运动规划
在[quick start]界面,加载my_motion_planning.launch,并且点击[motion planning]按钮。
“~/.autoware/my_launch/my_motion_planning.launch”