摘要:
左手和右手(直角)坐标系交叉乘法计算公式右手坐标系下交叉乘法公式基于右手坐标系,并满足以下条件:[vec{i}imesvec{i}=vec{j}imesvec{j}=vec{k}imesvec{k}=vec{0}][vec{i}timesvec{j}=-vc{j}imesvec{i}=vec{k}][vec{k}imesvec{i}=-vc{k}timesvec{j}=vec k}}]并将其设置为:[vec{v1}=egin{pmatrix}vec{i}&vec{j}&vec{k}end{pmatrix}egin{pmametrix}x_1 y_1 z1 end{dmatrix}=x_1vec{i}+y1vec{j}+z1 vec{k}][vec{v2}=egin{pmatrix}vec{i}&vec{j}&vec{k}end{pmametrix}egin}pmatrics}x_ 2\y_2\z_2 end{dmatrix}=x_ 2vec{{i}+y_2vec j}+z_2 vec{k}]为:[vec{v1}imesvec{v2}=times][=egin}y1&z_1x_2&y2&z_2端{vmatrix}=egin{vmetrix}vec{i}&vec{k}x_1&y1&z_1 x_2&y_2&z_2末端{vm矩阵}]下交叉乘法公式在左手坐标系中,并满足以下条件:[vec{i}imesvec{i}=vec{j‘}imesvec{j‘}=vec{k}imesvec{k}=vec{0}][vec{i}imesvec{j'}=-vec{j’}imesvec{i}=-vec{k}][vec{j‘}imesvec{k}=-vc{j}][vec{j‘}}timesvec{k}=-vec{j‘}],并将其设置为如下:[vec{v1}=egin{pmatrix}vec{i}&vec{j‘}&vec{k}end{pmametrix}egin}pmatrix}x1‘y1‘z1‘end{dmatrix}=x_1'向量{i}+y_1'向量{j'}+z_1'向量{k}][vec{v2}=egin{pmatrix}向量{i}和vec{j}&vec{k}end{pmametrix}egin}pmatrics}x_2'\y_2'\z_2'end{dmatrix}=x_2'向量{i}+y_2'向量{j'}+z_2'向量{k}]为:[vec v1}imesvec{v2}=times][=egin{vmatrix}-矢量{i}&矢量{j’}&-矢量{k}x_1’&y_1’&z1‘x_2’&y_2’&z2’端{vmatrix}=-egin{vmetrix}vec{i’&矢量{j’}&矢量{k}x1‘&y_1‘&z1’x 2‘&y_2‘&z2‘端{vmatrix}=egin{vmetrix}vec{i}&vec{}j}&vec{k}x_1‘&-y1‘&z_1‘x_2‘&-y2‘&z_2‘end{vmtrix}]计算左手系统在左手系统下的坐标:[vec{{v_1}imesvec{v2}=-egin{vmattix}vec i}}&vec j‘}&vec{k’}\x_1‘&y1‘&z _1‘\x_2‘&y 2‘&z_2’end{vmatrix}}]计算左手系下右手系的坐标:[vec{v_1}imesvec{v2}=egin{vmatrix}vec{i}&vec{j}&vec{k}x_1‘&-y1‘&z1‘x_2‘&-y2‘&z 2‘end{vmetrix}]左侧系统坐标和右侧系统坐标之间的关系[egin{pmatrix}x_ 1‘y1‘z1‘end{pmatrix}=egin{pmatrix}e_1‘&-ee2&e3end{pmatrix}egin{dmatrix}x_1‘y_1‘z1&0&1&0 0&0&1结束{pmatrix}开始{pmametrix}x_1 y_1 z_1end{pmatrix}=egin{pmametrix}x_1 \-y_1 \z_1end}pmatrix},因此左手交叉乘法[vec{v1}imesvec{v2}=ecin{vmatrix}vec{i}&vec{j}&vec k}x_ 1‘&-y1‘&z_1‘x_2‘&-y2‘&z 2‘2end x}]
左右手(直角)坐标系叉乘计算公式
右手坐标系下叉乘公式
设右手坐标系基为({vec{i},vec{j},vec{k}}),并满足以下条件:
[vec{i} imesvec{i} =vec{j} imesvec{j} =vec{k} imesvec{k} =vec{0} ]
[vec{i} imesvec{j}=-vec{j} imesvec{i} =vec{k} ]
[vec{k} imesvec{i} =-vec{i} imesvec{k} =vec{j} ]
[vec{j} imesvec{k} =-vec{k} imesvec{j} =vec{i} ]
并设(vec{v_1},vec{v_2})如下:
[vec{v_1}=egin{pmatrix}vec{i} & vec{j} & vec{k}end{pmatrix}egin{pmatrix}x_1 \ y_1 \ z_1end{pmatrix}=x_1vec{i} + y_1vec{j} + z_1vec{k} ]
[vec{v_2}=egin{pmatrix}vec{i} & vec{j} & vec{k}end{pmatrix}egin{pmatrix}x_2 \ y_2 \ z_2end{pmatrix}=x_2vec{i} + y_2vec{j} + z_2vec{k} ]
则(vec{v_1} imes vec{v_2})为:
[vec{v_1} imes vec{v_2} =(x_1vec{i} + y_1vec{j} + z_1vec{k}) imes(x_2vec{i} + y_2vec{j} + z_2vec{k}) ]
[=egin{vmatrix}vec{j} imesvec{k} & vec{k} imesvec{i} & vec{i} imesvec{j} \ x_1 & y_1 & z_1 \ x_2 & y_2 & z_2end{vmatrix} =egin{vmatrix}vec{i} & vec{j} & vec{k} \ x_1 & y_1 & z_1 \ x_2 & y_2 & z_2end{vmatrix} ]
左手坐标系下叉乘公式
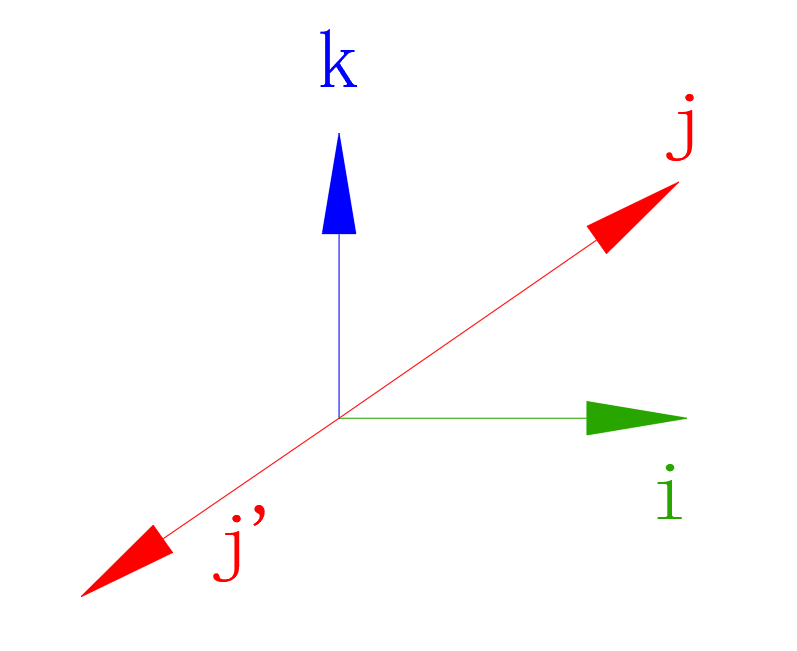
设左手坐标系基为({vec{i},vec{j'},vec{k}}),其中(vec{j'}=-vec{j}),并满足以下条件:
[vec{i} imesvec{i} =vec{j'} imesvec{j'} =vec{k} imesvec{k} =vec{0} ]
[vec{i} imesvec{j'}=-vec{j'} imesvec{i} =-vec{k} ]
[vec{k} imesvec{i} =-vec{i} imesvec{k} =-vec{j'} ]
[vec{j'} imesvec{k} =-vec{k} imesvec{j'} =-vec{i} ]
并设(vec{v_1},vec{v_2})如下:
[vec{v_1}=egin{pmatrix}vec{i} & vec{j'} & vec{k}end{pmatrix}egin{pmatrix}x_1' \ y_1' \ z_1'end{pmatrix}=x_1'vec{i} + y_1'vec{j'} + z_1'vec{k} ]
[vec{v_2}=egin{pmatrix}vec{i} & vec{j'} & vec{k}end{pmatrix}egin{pmatrix}x_2' \ y_2' \ z_2'end{pmatrix}=x_2'vec{i} + y_2'vec{j'} + z_2'vec{k} ]
则(vec{v_1} imes vec{v_2})为:
[vec{v_1} imes vec{v_2} =(x_1'vec{i} + y_1'vec{j'} + z_1'vec{k}) imes(x_2'vec{i} + y_2'vec{j'} + z_2'vec{k}) ]
[=egin{vmatrix}-vec{i} & -vec{j'} & -vec{k} \ x_1' & y_1' & z_1' \ x_2' & y_2' & z_2'end{vmatrix}=-egin{vmatrix}vec{i} & vec{j'} & vec{k} \ x_1' & y_1' & z_1' \ x_2' & y_2' & z_2'end{vmatrix}=egin{vmatrix}vec{i} & vec{j} & vec{k} \ x_1' & -y_1' & z_1' \ x_2' & -y_2' & z_2'end{vmatrix} ]
左手系下计算左手系坐标:
[vec{v_1} imes vec{v_2} =-egin{vmatrix}vec{i} & vec{j'} & vec{k} \ x_1' & y_1' & z_1' \ x_2' & y_2' & z_2'end{vmatrix} ]
左手系下计算右手系坐标:
[vec{v_1} imes vec{v_2} =egin{vmatrix}vec{i} & vec{j} & vec{k} \ x_1' & -y_1' & z_1' \ x_2' & -y_2' & z_2'end{vmatrix} ]
左手系坐标与右手系坐标之间关系
[egin{pmatrix}x_1' \ y_1' \ z_1'end{pmatrix} =egin{pmatrix}e_1 & -e_2 & e_3end{pmatrix}egin{pmatrix}x_1 \ y_1 \ z_1end{pmatrix} =egin{pmatrix}1 & 0 & 0\0 & -1 & 0\0 & 0 & 1end{pmatrix}egin{pmatrix}x_1 \ y_1 \ z_1end{pmatrix} =egin{pmatrix}x_1 \ -y_1 \ z_1end{pmatrix} ]
同理,(egin{pmatrix}x_1 \ y_1 \ z_1end{pmatrix}=egin{pmatrix}x_1' \ -y_1' \ z_1'end{pmatrix})
从而,左手系叉乘法
[vec{v_1} imes vec{v_2} =egin{vmatrix}vec{i} & vec{j} & vec{k} \ x_1' & -y_1' & z_1' \ x_2' & -y_2' & z_2'end{vmatrix} =egin{vmatrix}vec{i} & vec{j} & vec{k} \ x_1 & y_1 & z_1 \ x_2 & y_2 & z_2end{vmatrix} ]