一、 镜头主要参数
1.焦距(FocalLength)
焦距是从镜头的中心点到胶平面上所形成的清晰影像之间的距离(注意!,相机的焦距与单片凸透镜的焦距是两个概念,因为相机上安装的镜头是多片薄的凸透镜组成,单片凸透镜的焦距是平行光线汇聚到一点,这点到凸透镜中心的距离)。焦距的大小决定着视角的大小,焦距数值小,视角大,所观察的范围也大;焦距数值大,视角小,观察范围小。根据焦距能否调节,可分为定焦镜头和变焦镜头两大类。
2.光圈(Iris)
用F表示,以镜头焦距f和通光孔径D的比值来衡量。每个镜头上都标有最大F值,例如 8mm /F1.4代表最大孔径为 5.7毫米 。F值越小,光圈越大,F值越大,光圈越小。
3.对应最大CCD尺寸(SensorSize)
镜头成像直径可覆盖的最大CCD芯片尺寸。主要有:1/2″、2/3″、1″和1″以上。
4.接口(Mount)
镜头与相机的连接方式。常用的包括C、CS、F、V、T2、Leica、M42x1、M75x0.75等。
5.景深(Depth ofField,DOF)
景深是指在被摄物体聚焦清楚后,在物体前后一定距离内,其影像仍然清晰的范围。景深随镜头的光圈值、焦距、拍摄距离而变化。光圈越大,景深越小;光圈越小、景深越大。焦距越长,景深越小;焦距越短,景深越大。距离拍摄体越近时,景深越小;距离拍摄体越远时,景深越大。
6.分辨率(Resolution)
分辨率代表镜头记录物体细节的能力,以每毫米里面能够分辨黑白对线的数量为计量单位:“线对/毫米”(lp/mm)。分辨率越高的镜头成像越清晰。
7、工作距离(Workingdistance,WD)
镜头第一个工作面到被测物体的距离。
8、视野范围(Field ofView,FOV)
相机实际拍到区域的尺寸。
9、光学放大倍数(Magnification,ß)
CCD/FOV,即芯片尺寸除以视野范围。
10、数值孔径(Numerical Aperture,NA)
数值孔径等于由物体与物镜间媒质的折射率n与物镜孔径角的一半(a2)的正弦值的乘积,计算公式为N.A=n*sina/2。数值孔径与其它光学参数有着密切的关系,它与分辨率成正比,与放大率成正比。也就是说数值孔径,直接决定了镜头分辨率,数值孔径越大,分辨率越高,否则反之。
11、后背焦(Flangedistance)
准确来说,后倍焦是相机的一个参数,指相机接口平面到芯片的距离。但在线扫描镜头或者大面阵相机的镜头选型时,后倍焦是一个非常重要的参数,因为它直接影响镜头的配置。不同厂家的相机,哪怕接口一样也可能有不同的后倍焦。
二、镜头选型
1.选择镜头接口和最大CCD尺寸
镜头接口只要可跟相机接口匹配安装或可通过外加转换口匹配安装就可以了;镜头可支持的最大CCD尺寸应大于等于选配相机CCD芯片尺寸。
2.选择镜头焦距
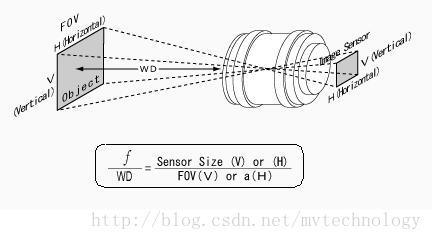
如图所示,在已知相机CCD尺寸、工作距离(WD)和视野(FOV)的情况下,可以计算出所需镜头的焦距(f)。
3.选择镜头光圈
镜头的光圈大小决定图像的亮度,在拍摄高速运动物体、曝光时间很短的应用中,应该选用大光圈镜头,以提高图像亮度。
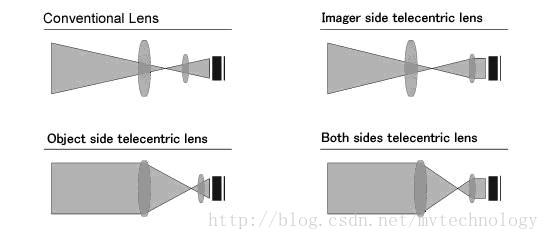
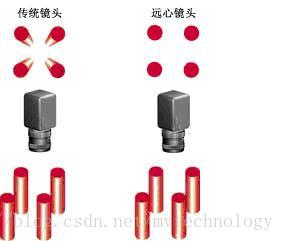
4.选择远心镜头
远心镜头是为纠正传统镜头的视差而特殊设计的镜头,它可以在一定的物距范围内,使得到的图像放大倍率不会随物距的变化而变化。远心镜头与传统镜头对比,如图:
远心镜头又分为物方远心和双侧远心两种,如图: