什么是FUSE
传统的文件系统是操作系统的一部分,放在操作系统内核里面实现。Fuse(Filesystem in Userspace), 一个用户空间文件系统框架,提供给我们一组用于实现一个文件系统的API,使我们可以在用户态实现自已的文件系统。
FUSE的优缺点
1)传统文件系统都是定义在操作系统内核层面上的,要操作系统识别一种新的文件系统,必需重写内核,而内核态代码难以调试,生产率较低;但是用户空间编程和调试难度较小,有更多的语言可以选择(目前FUSE已经绑定了很多语言,比如c++、java等),还可以复用已有的库),从而能够大幅提高生产率,极大地简少了为操作系统提供新的文件系统的工作量。
2)一些服务可以通过统一的文件系统接口来进行访问,比如说ftp、sftp、samba
3)可以把非文件的服务当做文件来实现,比如把gmail提供的巨大的空间用来进行文件存储的Gmail Filesystem
4)在用户态实现文件系统必然会引入额外的内核态/用户态切换带来的开销,对性能会产生一定影响。
FUSE的结构
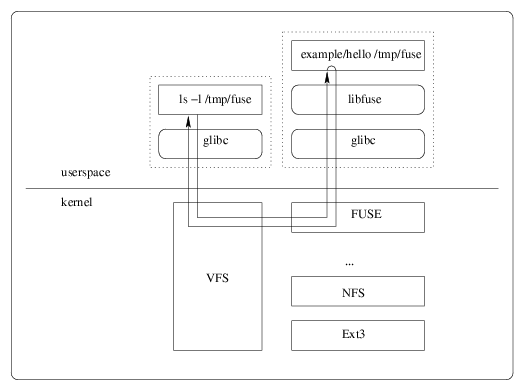
fuse包括三个模块:用户空间库,内核模块以及mount工具
1)用户空间库给程序员提供编程接口,程序员通过实现fuse提供的两组接口fuse_lowlevel_ops,fuse_operations之一即可实现一个用户空间文件系统
2)内核模块实现了一个完整文件系统的框架,但具体操作没有实现(由程序员在用户空间实现)
3)mount工具fusermount用于挂载基于fuse的文件系统
定义FUSE需要的函数
fuse为开发者提供了两组接口,分别是fuse_lowlevel_ops以及fuse_operations,开发者只需要实现这两组接口的一种即可实现一个用户空间文件系统。
struct fuse_lowlevel_ops的成员如下所示,其中init方法在其它所有方法之前调用,用于初始化文件系统,fuse已经实现,destroy则是在文件系统被卸载时做一些清理工作。用于大多数请求的参数都是fuse_ino_t类型的ino,而文件系统提供给用户的视图是以文件名呈现的,故lookup是实现文件系统的关键,它在parent中查找名字name对应的文件,并返回相应的信息,可使用fuse_reply_entry或fuse_reply_err作为请求的返回。
接口中的方法对于了解过VFS的人应该都不难理解,只要按需实现这些接口,你就可以定制出属于自己的文件系统,这组接口的详细说明见fuse_lowlevel.h。
void(* init )(void *userdata, struct fuse_conn_info *conn) void(* destroy )(void *userdata) void(* lookup )(fuse_req_t req, fuse_ino_t parent, const char *name) void(* forget )(fuse_req_t req, fuse_ino_t ino, unsigned long nlookup) void(* getattr )(fuse_req_t req, fuse_ino_t ino, struct fuse_file_info *fi) void(* setattr )(fuse_req_t req, fuse_ino_t ino, struct stat *attr, int to_set, struct fuse_file_info *fi) void(* readlink )(fuse_req_t req, fuse_ino_t ino) void(* mknod )(fuse_req_t req, fuse_ino_t parent, const char *name, mode_t mode, dev_t rdev) void(* mkdir )(fuse_req_t req, fuse_ino_t parent, const char *name, mode_t mode) void(* unlink )(fuse_req_t req, fuse_ino_t parent, const char *name) void(* rmdir )(fuse_req_t req, fuse_ino_t parent, const char *name) void(* symlink )(fuse_req_t req, const char *link, fuse_ino_t parent, const char *name) void(* rename )(fuse_req_t req, fuse_ino_t parent, const char *name, fuse_ino_t newparent, const char *newname) void(* link )(fuse_req_t req, fuse_ino_t ino, fuse_ino_t newparent, const char *newname) void(* open )(fuse_req_t req, fuse_ino_t ino, struct fuse_file_info *fi) void(* read )(fuse_req_t req, fuse_ino_t ino, size_t size, off_t off, struct fuse_file_info *fi) void(* write )(fuse_req_t req, fuse_ino_t ino, const char *buf, size_t size, off_t off, structfuse_file_info *fi) void(* flush )(fuse_req_t req, fuse_ino_t ino, struct fuse_file_info *fi) void(* release )(fuse_req_t req, fuse_ino_t ino, struct fuse_file_info *fi) void(* fsync )(fuse_req_t req, fuse_ino_t ino, int datasync, struct fuse_file_info *fi) void(* opendir )(fuse_req_t req, fuse_ino_t ino, struct fuse_file_info *fi) void(* readdir )(fuse_req_t req, fuse_ino_t ino, size_t size, off_t off, struct fuse_file_info *fi) void(* releasedir )(fuse_req_t req, fuse_ino_t ino, struct fuse_file_info *fi) void(* fsyncdir )(fuse_req_t req, fuse_ino_t ino, int datasync, struct fuse_file_info *fi) void(* statfs )(fuse_req_t req, fuse_ino_t ino) void(* setxattr )(fuse_req_t req, fuse_ino_t ino, const char *name, const char *value, size_t size, int flags) void(* getxattr )(fuse_req_t req, fuse_ino_t ino, const char *name, size_t size) void(* listxattr )(fuse_req_t req, fuse_ino_t ino, size_t size) void(* removexattr )(fuse_req_t req, fuse_ino_t ino, const char *name) void(* access )(fuse_req_t req, fuse_ino_t ino, int mask) void(* create )(fuse_req_t req, fuse_ino_t parent, const char *name, mode_t mode, struct fuse_file_info*fi) void(* getlk )(fuse_req_t req, fuse_ino_t ino, struct fuse_file_info *fi, struct flock *lock) void(* setlk )(fuse_req_t req, fuse_ino_t ino, struct fuse_file_info *fi, struct flock *lock, int sleep) void(* bmap )(fuse_req_t req, fuse_ino_t ino, size_t blocksize, uint64_t idx) void(* ioctl )(fuse_req_t req, fuse_ino_t ino, int cmd, void *arg, struct fuse_file_info *fi, unsigned *flagsp, const void *in_buf, size_t in_bufsz, size_t out_bufszp) void(* poll )(fuse_req_t req, fuse_ino_t ino, struct fuse_file_info *fi, struct fuse_pollhandle *ph)
用户实现的接口是如何跟这个结构关联起来的?
其实fuse中已经实现了一组接口,在fuse_lowlevel.c中,定义了一个静态的结构数组,该数组的元素为一组(函数,名字)的结构,但没做什么实际的工作,当fuse用户空间的daemon从/fuse/dev中读取到请求之后,它通过请求号来判别各个请求,并调用这里相应的处理函数,如读取到read调用时,会调用do_read进行处理。
static struct {
void (*func)(fuse_req_t, fuse_ino_t, const void *);
const char *name;
} fuse_ll_ops[] = {
//只列举了部分
[FUSE_LOOKUP] = { do_lookup, "LOOKUP" },
[FUSE_OPEN] = { do_open, "OPEN" },
[FUSE_READ] = { do_read, "READ" },
[FUSE_WRITE] = { do_write, "WRITE" },
[FUSE_STATFS] = { do_statfs, "STATFS" },
[FUSE_FLUSH] = { do_flush, "FLUSH" },
[FUSE_INIT] = { do_init, "INIT" },
[FUSE_OPENDIR] = { do_opendir, "OPENDIR" },
[FUSE_READDIR] = { do_readdir, "READDIR" },
[FUSE_RELEASEDIR] = { do_releasedir, "RELEASEDIR" },
[FUSE_DESTROY] = { do_destroy, "DESTROY" }
};
接下来看一下do_read的实现
static void do_read(fuse_req_t req, fuse_ino_t nodeid, const void *inarg)
{
struct fuse_read_in *arg = (struct fuse_read_in *) inarg;
// 如果用户实现了read操作,则调用用户空间的read,否则以没有实现该调用为错误响应,这里的op就是用户实现文件系统时实现的,并传递给fuse。
if (req->f->op.read) {
struct fuse_file_info fi;
memset(&fi, 0, sizeof(fi));
fi.fh = arg->fh;
fi.fh_old = fi.fh;
req->f->op.read(req, nodeid, arg->size, arg->offset, &fi);
} else
fuse_reply_err(req, ENOSYS);
}
从这里的实现可以看出,这些操作是没有加任何锁的,如果开发者需要文件系统锁,需要在实现文件系统时自行考虑。
fuse_operations又是怎么一回事?
对于实现fuse_lowlevel_ops这组接口,没有内核VFS相关知识的开发者是不可能完成的,为了增强fuse的通用性,使更多的用户能够使用fuse开发文件系统,fuse提供了一组更简单的接口fuse_operations,详细说明请参考fuse.h。这组接口的参数跟unix提供的系统调用的参数很类似,开发者更易理解,fuse想开发者屏蔽了底层的相关对象,直接以文件名作为参数,只有开发者按照自己的方式,把这组接口实现就可以,显然这比上面那组接口的实现要简单得多。
struct fuse_operations {
int (*getattr) (const char *, struct stat *);
int (*readlink) (const char *, char *, size_t);
int (*getdir) (const char *, fuse_dirh_t, fuse_dirfil_t);
int (*mknod) (const char *, mode_t, dev_t);
int (*mkdir) (const char *, mode_t);
int (*unlink) (const char *);
int (*rmdir) (const char *);
int (*symlink) (const char *, const char *);
int (*rename) (const char *, const char *);
int (*link) (const char *, const char *);
int (*chmod) (const char *, mode_t);
int (*chown) (const char *, uid_t, gid_t);
int (*truncate) (const char *, off_t);
int (*utime) (const char *, struct utimbuf *);
int (*open) (const char *, struct fuse_file_info *);
int (*read) (const char *, char *, size_t, off_t, struct fuse_file_info *);
int (*write) (const char *, const char *, size_t, off_t,struct fuse_file_info *);
int (*statfs) (const char *, struct statfs *);
int (*flush) (const char *, struct fuse_file_info *);
int (*release) (const char *, struct fuse_file_info *);
int (*fsync) (const char *, int, struct fuse_file_info *);
int (*setxattr) (const char *, const char *, const char *, size_t, int);
int (*getxattr) (const char *, const char *, char *, size_t);
int (*listxattr) (const char *, char *, size_t);
int (*removexattr) (const char *, const char *);
};
这些操作并非都是必需的,但是一个文件系统要想正常工作,就需要其中的很多函数。
提供这组接口,fuse做了什么?
fuse还是实现了一组fuse_lowlevel_ops的接口,在fuse.c中
static struct fuse_lowlevel_ops fuse_path_ops = {
//只列举了部分方法
.init = fuse_lib_init,
.destroy = fuse_lib_destroy,
.lookup = fuse_lib_lookup,
.forget = fuse_lib_forget,
.getattr = fuse_lib_getattr,
.setattr = fuse_lib_setattr,
.access = fuse_lib_access,
.read = fuse_lib_read,
.readlink = fuse_lib_readlink
};
fuse实现的这组接口跟之前的方法不一样,不是什么都不做,它完成了部分工作,主要是文件节点与文件名的转换关系,然后将文件名作为参数,调用用户实现的fuse_operations的接口。
如fuse_lib_read的实现
int fuse_fs_read(struct fuse_fs *fs, const char *path, char *buf, size_t size,
off_t off, struct fuse_file_info *fi)
{
fuse_get_context()->private_data = fs->user_data;
//用户实现的方法
if (fs->op.read)
return fs->op.read(path, buf, size, off, fi);
else
return -ENOSYS;
}
static void fuse_lib_read(fuse_req_t req, fuse_ino_t ino, size_t size,
off_t off, struct fuse_file_info *fi)
{
struct fuse *f = req_fuse_prepare(req);
char *path;
char *buf;
int res;
buf = (char *) malloc(size);
if (buf == NULL) {
reply_err(req, -ENOMEM);
return;
}
res = -ENOENT;
pthread_rwlock_rdlock(&f->tree_lock); //fuse_operations使用了读写锁
//由ino获取path
path = get_path(f, ino);
if (path != NULL) {
struct fuse_intr_data d;
if (f->conf.debug)
fprintf(stderr, "READ[%llu] %lu bytes from %llun",
(unsigned long long) fi->fh, (unsigned long) size,
(unsigned long long) off);
fuse_prepare_interrupt(f, req, &d);
res = fuse_fs_read(f->fs, path, buf, size, off, fi); //通过这个方法调用用户实现的方法
fuse_finish_interrupt(f, req, &d);
free(path);
}
pthread_rwlock_unlock(&f->tree_lock);
if (res >= 0) {
if (f->conf.debug)
fprintf(stderr, " READ[%llu] %u bytesn",
(unsigned long long)fi->fh, res);
if ((size_t) res > size)
fprintf(stderr, "fuse: read too many bytes");
fuse_reply_buf(req, buf, res); //返回结果
} else
reply_err(req, res);
free(buf);
FUSE 流程
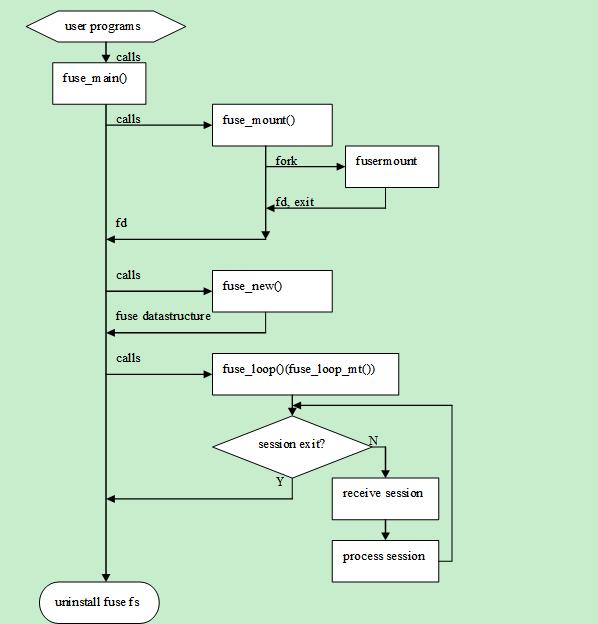
通过这幅图可以看到三个模块在fuse工作时所起的作用
fuse_main() (lib/helper.c)——fuse用户空间主函数,用户程序调用它时,fuse_main()函数解析相关参数(如mountpoint,multithreaded),并调用fuse_mount()函数,接着调用fuse_new()函数,为fuse文件系统数据分配存储空间。最后调用fuse_loop()函数实现会话的接受与处理。
fuse_mount() (lib/mount.c)——创建UNIX本地套接口,创建并运行子进程fusermount。
fusermount (util/fusermount.c)——确保fuse模块已经加载,通过UNIX套接口返回fuse模块的文件fd给fuse_mount()函数。
fuse_new() (lib/fuse.c)——为fuse创建数据结构空间,用来存储文件系统数据。
fuse_loop() (lib/fuse.c)( fuse_loop_mt() (lib/fuse_mt.c))——从/dev/fuse (/dev 设备文件存储目录)读取文件系统调用,调用fuse_operations或fuse_lowlevel_ops结构中的处理函数,返回调用结果给/dev/fuse
FUSE Kernel模块由两部分组成:
第一部分——proc文件系统组件:Kernel/dev.c——回应io请求到/dev/fuse。fuse_dev_read()函数负责读出文件,并将来自“list of request”结构体的命令返回到调用函数。fuse_dev_write ()负责文件写入,并将写入的数据置放到“req→out”数据结构中。
第二部分——文件系统调用部分:kernel/file.c,kernel/inode.c,kernel/dir.c——调用request_send(),将请求加入到“list of request”结构体中,等待回复(reply)。
Fuse调用流程
在shell里输入命令,请求通过vfs到达fuse,然后通过用户实现的fuse给出的API返回调用。
Fuse处理请求的核心工作就是进行队列管理
两个重要的数据结构 fc, req
/* A Fuse connection.
* This structure is created, when the filesystem is mounted, and is destroyed, when the
* client device is closed and the filesystem is unmounted.
*/
Struct fuse_conn
{
/** Readers of the connection are waiting on this */
wait_queue_head_t waitq; // 等待执行请求的进程的队列
/** The list of pending requests */
struct list_head pending; // 被挂起的请求 的队列
/** The list of requests being processed */
struct list_head processing; // 正在被处理的请求的 队列
/** Pending interrupts */
struct list_head interrupts; // 执行中被中断的请求的 队列
...
}
/*
*A request to the client
*/
struct fuse_req
{
/** Used to wake up the task waiting for completion of request*/
wait_queue_head_t waitq; // 请求的等待队列
…
}
fuse通过fuse_session_loop来启动守护程序,守护程序最终会调用fuse_dev_readv, fuse_dev_readv调用request_wait,使得进程在fc的waitq队列上睡眠。
Static size_t fuse_dev_readv(struct file *file, const struct iovec *iov, unsigned long nr_segs, loff_t *off)
{
….
request_wait(fc);
….
}
* Wait until a request is available on the pending list
*当前进程一直等待,直到挂起队列中有一个请求
*/
static void request_wait(struct fuse_conn *fc)
{
DECLARE_WAITQUEUE(wait, current); //定义一个队列节点变量wait,其与当前进程相关联
add_wait_queue_exclusive(&fc->waitq, &wait); //将wait加入到fc->waitq等待队列中
//不断的检查fc的pending队列及interrupts队列,看是否有请求,没有请求一直while循环
while (fc->connected && !request_pending(fc))
{
set_current_state(TASK_INTERRUPTIBLE);
if (signal_pending(current)) break;
spin_unlock(&fc->lock);
schedule(); //选择一个进程运行
spin_lock(&fc->lock);
}
// 有请求,将进程设为TASK_RUNNING状态(被唤醒,被赋予CPU使用权)
set_current_state(TASK_RUNNING);
remove_wait_queue(&fc->waitq, &wait); // 将wait(当前进程)从等待队列中移除
}
③// fc的pending队列及interrupts队列,看是否有请求
static int request_pending(struct fuse_conn *fc)
{
return !list_empty(&fc->pending) || !list_empty(&fc->interrupts);
}
request_send是用户请求经过vfs(如上面的图),再到fuse operation中被调用的,它向/dev/fuse发送请求
void request_send(struct fuse_conn *fc, struct fuse_req *req)
{
……
queue_request(fc, req);
request_wait_answer(fc, req);
……
}
⑤static void queue_request(struct fuse_conn *fc, struct fuse_req *req)
{
list_add_tail(&req->list, &fc->pending); //将请求加入到pending队列
req->state = FUSE_REQ_PENDING;
if (!req->waiting)
{
req->waiting = 1;
atomic_inc(&fc->num_waiting);
}
wake_up(&fc->waitq); //唤醒等待等列
kill_fasync(&fc->fasync, SIGIO, POLL_IN);
}
/* Called with fc->lock held. Releases, and then reacquires it. */
//该调用会在req的waitq上睡眠,fuse守护程序处理完请求后,会将其唤醒
static void request_wait_answer(struct fuse_conn *fc, struct fuse_req *req)
{
if (!fc->no_interrupt)
{
/* Any signal may interrupt this */
wait_answer_interruptible(fc, req);
if (req->aborted)
goto aborted;
if (req->state == FUSE_REQ_FINISHED)
return;
req->interrupted = 1;
if (req->state == FUSE_REQ_SENT)
queue_interrupt(fc, req);
}
if (req->force) {
spin_unlock(&fc->lock);
wait_event(req->waitq, req->state == FUSE_REQ_FINISHED);
spin_lock(&fc->lock);
} else {
sigset_t oldset;
/* Only fatal signals may interrupt this */
block_sigs(&oldset);
wait_answer_interruptible(fc, req);
restore_sigs(&oldset);
}
if (req->aborted)
goto aborted;
if (req->state == FUSE_REQ_FINISHED) return;
req->out.h.error = -EINTR;
req->aborted = 1;
aborted:
if (req->locked) {
/* This is uninterruptible sleep, because data is
being copied to/from the buffers of req. During
locked state, there mustn't be any filesystem
operation (e.g. page fault), since that could lead
to deadlock */
spin_unlock(&fc->lock);
wait_event(req->waitq, !req->locked);
spin_lock(&fc->lock);
}
if (req->state == FUSE_REQ_PENDING) {
list_del(&req->list);
__fuse_put_request(req);
} else if (req->state == FUSE_REQ_SENT) {
spin_unlock(&fc->lock);
wait_event(req->waitq, req->state == FUSE_REQ_FINISHED);
spin_lock(&fc->lock);
}
}
}
(左列七行)fuse守护程序处理完请求,最终通过fuse_dev_writev写回/dev/fuse,它将唤醒相应req中waitq的等待队列元素,从而让文件系统请求完成request_wait_answer,获取到结果。
⑦/**Write a single reply to a request. First the header is copied from the write buffer. The request is then *searched on the processing list by the unique ID found in the header. If found, then remove it from the list *and copy the rest of the buffer to the request. The request is finished by calling request_end()
*/
static ssize_t fuse_dev_writev(struct file *file, const struct iovec *iov, unsigned long nr_segs, loff_t *off)
{
……..
req = request_find(fc, oh.unique);
request_end(fc, req);
….
}
⑧/* * This function is called when a request is finished. Either a reply has arrived or it was aborted (and not yet *sent) or some error occurred during communication with userspace, or the device file was closed. The *requester thread is woken up (if still waiting), the 'end' callback is called if given, else the reference to the *request is released Called with fc->lock, unlocks it
*/
static void request_end(struct fuse_conn *fc, struct fuse_req *req)
{
….
wake_up(&req->waitq); //唤醒req上的等待队列
……
}
fuse通过fuse_session_loop(或对应多线程的方法)来启动fuse守护程序,守护程序不断的从/dev/fuse上读取请求,并处理。
int fuse_session_loop(struct fuse_session *se) //在fuse_main中会被调用,或其多线程版本
{
int res = 0;
struct fuse_chan *ch = fuse_session_next_chan(se, NULL);
size_t bufsize = fuse_chan_bufsize(ch);
char *buf = (char *) malloc(bufsize); //为channel分配好缓冲区
if (!buf) {
fprintf(stderr, "fuse: failed to allocate read buffer
");
return -1;
}
//fuse daemon, loops
while (!fuse_session_exited(se)) {
struct fuse_chan *tmpch = ch;
// 从/dev/fuse读请求,会等待一直到有请求为止
res = fuse_chan_recv(&tmpch, buf, bufsize);
if (res == -EINTR) continue;
if (res <= 0) break;
fuse_session_process(se, buf, res, tmpch); //处理读到的请求
}
free(buf);
fuse_session_reset(se);
return res < 0 ? -1 : 0;
}
②int fuse_chan_recv(struct fuse_chan **chp, char *buf, size_t size)
{
struct fuse_chan *ch = *chp;
if (ch->compat)
return ((struct fuse_chan_ops_compat24 *) &ch->op)->receive(ch, buf, size);
else
return ch->op.receive(chp, buf, size); //由下面的一段代码可以发现,receive最终是通过
// fuse_kern_chan_receive实现的,代码片段3分析该请求
}
③#define MIN_BUFSIZE 0x21000
struct fuse_chan *fuse_kern_chan_new(int fd)
{
//channel的读写方法
struct fuse_chan_ops op = {
.receive = fuse_kern_chan_receive,
.send = fuse_kern_chan_send,
.destroy = fuse_kern_chan_destroy,
};
//设置bufsize大小
size_t bufsize = getpagesize() + 0x1000;
bufsize = bufsize < MIN_BUFSIZE ? MIN_BUFSIZE : bufsize;
return fuse_chan_new(&op, fd, bufsize, NULL);
}
static int fuse_kern_chan_receive(struct fuse_chan **chp, char *buf, size_t size)
{
struct fuse_chan *ch = *chp;
int err;
ssize_t res;
struct fuse_session *se = fuse_chan_session(ch);
assert(se != NULL);
// 一直轮询,直到读到请求为止
restart:
//fuse_chan_fd获取到/dev/fuse的文件描述符,调用read系统调用从设备读取请求
res = read(fuse_chan_fd(ch), buf, size);
//根据fuse设备驱动程序file结构的实现(dev.c),read将调用fuse_dev_read,该方法最终通过fuse_dev_readv
//实现,根据代码中的注释,fuse_dev_read做了如下工作:
// Read a single request into the userspace filesystem's buffer. This function waits until a request is available,
// then removes it from the pending list and copies request data to userspace buffer.
// 而fuse_dev_read又调用request_wait,使得进程在fc->waitq上睡眠
if no data: goto restart
………
}
以上的分析对应了fuse filesystem daemon做的第一部分工作。当用户从控制台输入"rm /mnt/fuse/file"时,通过VFS(sys_unlink),再到fuse(dir.c中实现的inode_operations,file.c中实现的file_operations中的方法都会最终调用request_send,后面会讲到),这个请求最终被发到了/dev/fuse中,该请求的到达会唤醒正在等待的fuse守护程序,fuse守护程序读取该请求并进行处理,接下来介绍处理请求所作的工作。
⑤struct fuse_session *fuse_lowlevel_new_common(struct fuse_args *args,
const struct fuse_lowlevel_ops *op,
size_t op_size, void *userdata)
{
//fuse_lowlevel_ops在之前的文章
http://blog.chinaunix.net/u2/87570/showart_2166461.html中已经介绍//过了,开发者实现了fuse_lowlevel_ops并传递给fuse_lowlevel_common
struct fuse_ll *f;
struct fuse_session *se;
struct fuse_session_ops sop = {
//最终调用的处理方法
.process = fuse_ll_process, //分析见代码片段5
.destroy = fuse_ll_destroy,
};
…….
}
⑥static void fuse_ll_process(void *data, const char *buf, size_t len, struct fuse_chan *ch)
{
struct fuse_ll *f = (struct fuse_ll *) data;
struct fuse_in_header *in = (struct fuse_in_header *) buf;
const void *inarg = buf + sizeof(struct fuse_in_header);
struct fuse_req *req;
//创建并初始化一个请求
req = (struct fuse_req *) calloc(1, sizeof(struct fuse_req));
if (req == NULL) {
fprintf(stderr, "fuse: failed to allocate request
");
return;
}
req->f = f;
req->unique = in->unique;
……
//根据opcode调用fuse_ll_ops中相应的方法,fuse_ll_ops的介绍
// http://blog.chinaunix.net/u2/87570/showart_2166461.html
fuse_ll_ops[in->opcode].func(req, in->nodeid, inarg);
}
}
以上代码对应中流程中perform unlink的工作,实际上就是执行开发者实现的一组方法来完成相关的工作,接下来就是把执行完请求后需要的数据返回,最终是通过send_reply实现的
⑦static int send_reply(fuse_req_t req, int error, const void *arg, size_t argsize)
{
struct iovec iov[2];
int count = 1;
if (argsize) {
iov[1].iov_base = (void *) arg;
iov[1].iov_len = argsize;
count++;
}
return send_reply_iov(req, error, iov, count);
}
⑧static int send_reply_iov(fuse_req_t req, int error, struct iovec *iov, int count)
{
……
res = fuse_chan_send(req->ch, iov, count);
free_req(req);
return res;
}
⑨static int fuse_kern_chan_send(struct fuse_chan *ch, const struct iovec iov[], size_t count)
{
if (iov) {
//将数据写到/dev/fuse上,最终会调用fuse_dev_write
ssize_t res = writev(fuse_chan_fd(ch), iov, count);
……
return 0;
}
另外fuse接收到VFS的请求时,通过request_send将请求发送到/fuse/dev,并调用request_wait_answer等待返回结果。至于fuse使用的队列的管理,在流程图中也做了简单的说明,下一篇文章将详细分析队列的管理。
void request_send(struct fuse_conn *fc, struct fuse_req *req)
{
req->isreply = 1;
spin_lock(&fc->lock);
if (!fc->connected)
req->out.h.error = -ENOTCONN;
else if (fc->conn_error)
req->out.h.error = -ECONNREFUSED;
else {
//将请求加入请求队列
queue_request(fc, req);
/* acquire extra reference, since request is still needed after request_end() */
__fuse_get_request(req);
//等待结果
request_wait_answer(fc, req);
}
spin_unlock(&fc->lock);
}