摘要:
相机重投影误差相机归一化公式:相机归一化与外参变换公式:相机畸变:代码://TemplatedpinholecameramodelforusedwithCeres.Thecamerais//parameterizedusing9parameters:3forrotation,3fortranslation,1for//focallengthand2forradialdistortion.Thepr
相机重投影误差
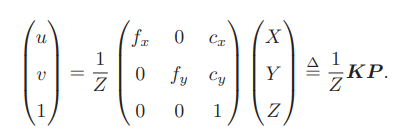
相机归一化公式:
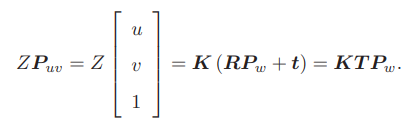
相机归一化与外参变换公式:
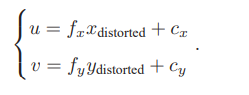
相机畸变:
代码:
//Templated pinhole camera model for used with Ceres. The camera is //parameterized using 9 parameters: 3 for rotation, 3 for translation, 1 for //focal length and 2 for radial distortion. The principal point is not modeled //(i.e. it is assumed be located at the image center). structSnavelyReprojectionError { SnavelyReprojectionError(double observed_x, doubleobserved_y) : observed_x(observed_x), observed_y(observed_y) {} template <typename T> bool operator()(const T* constcamera, const T* constpoint, T* residuals) const{ //camera[0,1,2] are the angle-axis rotation. T p[3]; AngleAxisRotatePoint(camera, point, p); //camera[3,4,5] are the translation. p[0] += camera[3]; p[1] += camera[4]; p[2] += camera[5]; //Compute the center of distortion. The sign change comes from //the camera model that Noah Snavely's Bundler assumes, whereby //the camera coordinate system has a negative z axis. const T xp = - p[0] / p[2]; const T yp = - p[1] / p[2]; //Apply second and fourth order radial distortion. const T& l1 = camera[7]; const T& l2 = camera[8]; const T r2 = xp*xp + yp*yp; const T distortion = 1.0 + r2 * (l1 + l2 *r2); //Compute final projected point position. const T& focal = camera[6]; const T predicted_x = focal * distortion *xp; const T predicted_y = focal * distortion *yp; //The error is the difference between the predicted and observed position. residuals[0] = predicted_x -observed_x; residuals[1] = predicted_y -observed_y; return true; } //Factory to hide the construction of the CostFunction object from //the client code. static ceres::CostFunction* Create(const doubleobserved_x, const doubleobserved_y) { return (new ceres::AutoDiffCostFunction<SnavelyReprojectionError, 2, 9, 3>( newSnavelyReprojectionError(observed_x, observed_y))); } doubleobserved_x; doubleobserved_y; }; //Templated pinhole camera model for used with Ceres. The camera is //parameterized using 10 parameters. 4 for rotation, 3 for //translation, 1 for focal length and 2 for radial distortion. The //principal point is not modeled (i.e. it is assumed be located at //the image center). structSnavelyReprojectionErrorWithQuaternions { //(u, v): the position of the observation with respect to the image //center point. SnavelyReprojectionErrorWithQuaternions(double observed_x, doubleobserved_y) : observed_x(observed_x), observed_y(observed_y) {} template <typename T> bool operator()(const T* constcamera, const T* constpoint, T* residuals) const{ //camera[0,1,2,3] is are the rotation of the camera as a quaternion. // //We use QuaternionRotatePoint as it does not assume that the //quaternion is normalized, since one of the ways to run the //bundle adjuster is to let Ceres optimize all 4 quaternion //parameters without a local parameterization. T p[3]; QuaternionRotatePoint(camera, point, p); p[0] += camera[4]; p[1] += camera[5]; p[2] += camera[6]; //Compute the center of distortion. The sign change comes from //the camera model that Noah Snavely's Bundler assumes, whereby //the camera coordinate system has a negative z axis. const T xp = - p[0] / p[2]; //x/z const T yp = - p[1] / p[2]; //y/z //Apply second and fourth order radial distortion. const T& l1 = camera[8]; const T& l2 = camera[9]; const T r2 = xp*xp + yp*yp; const T distortion = 1.0 + r2 * (l1 + l2 *r2); //Compute final projected point position. const T& focal = camera[7]; const T predicted_x = focal * distortion *xp; const T predicted_y = focal * distortion *yp; //The error is the difference between the predicted and observed position. residuals[0] = predicted_x -observed_x; residuals[1] = predicted_y -observed_y; return true; } //Factory to hide the construction of the CostFunction object from //the client code. static ceres::CostFunction* Create(const doubleobserved_x, const doubleobserved_y) { return (new ceres::AutoDiffCostFunction<SnavelyReprojectionErrorWithQuaternions, 2, 10, 3>( newSnavelyReprojectionErrorWithQuaternions(observed_x, observed_y))); } doubleobserved_x; doubleobserved_y; };