转眼距离开学又过去一个多月了,不知道大家在家里学习的怎么样?这段时间小编在家里也没闲着,时隔多日,再次为大家带来干货内容。
邻域搜索类启发式算法有很多种,比如禁忌搜索啦,模拟退火啦,变邻域搜索啦等等。这次带来的自适应大邻域搜索代码,相对上述几种会更复杂,编写相对全面。
小编在编写代码时,主要采用git-hub上一位作者de.markusziller的代码,参考他的ALNS框架下写出了解决带时间窗的车辆路径规划问题的代码,今天文章的主要内容将围绕代码实现展开。
算法介绍有关ALNS概念的介绍,公众号内已经有相关内容了,这里稍提一下,有疑惑的同学可以参考往期内容:
干货 | 自适应大邻域搜索(Adaptive Large Neighborhood Search)入门到精通超详细解析-概念篇
干货|自适应大规模邻域搜索算法求解带时间窗的车辆路径规划问题(上)
简单的讲,ALNS主要有两个特点:
1.先用destroy方法破坏当前解,再用repair方法组合成新解。
2.设计一组destroy,repair方法,动态评估每种方法的效果,在搜索中选用效果较好的方法。
ALNS算法是脱胎于大邻域搜索算法(Large Neighborhood Serach,LNS)的,第一个特点就是LNS的关键。通过带有随机性的destroy、repair方法构造新解,从而对解空间进行启发式搜索。
第二个特点是ALNS的自适应部分。类似于蚁群算法中的信息素,或禁忌搜索算法重点的禁忌表,由于ALNS算法的解空间是有destroy和repair方法定义的,因此这里记忆的主要是算子的使用情况。
下面针对这次的VRPTW代码进行一些讲解。
初始解:Greedy方法初始解的构造一般采用简单的greedy方法,这里小编编写了一个简单的greedy算法在满足时间窗约束和容量约束的情况下,往路径中不断加入距离最后一个客户距离最近的客户,若不满足约束,则使用下一辆车。
Greedy构造初始解(by.zll):
solution = 空集;
new route = 空集;
add depot to new route;
while unserved customers > 0:
c = find the closest customer();
if satisfy load constraint and time windows constraint:
add c to new route;
else:
add new route to solution;
new route = 空集;
end while
return solution
不过在实际测试中,小编也发现这种方法的一些缺陷。车辆数量约束较小、客户较少的Solomon算例,这种算法没有太大问题,而且构成的解效果不错;但对车辆约束较大、客户较多的Homberger算例,初始解可能无法在车辆约束内装满客户。因此构造方法还是视算例情况而定。
一种解决策略是放宽车辆上限,在后续优化中减少到约束条件内。对这次小编编写的代码,还可以采取另一种方式:构造违背约束条件的不可行解。因为在后续ALNS优化部分,我们允许不可行解的存在,因此可以将多余的客户随机插入greedy后的路径中,保证被服务到。
框架:ALNSProgress先给出ALNS框架的伪代码:
ALNSProgress(by.zll):
global_solution = initial_solution;
local_solution = global_solution;
for i = 0 to MaxIteration:
// 产生新解
current_solution = local_solution;
destroy_opt = Chose_destroy();
destroy_solution = Destroy(destroy_opt, current_solution);
repair_opt = Chose_repair();
new_solution = Repair(repair_opt, destroy_solution);
// 更新满意解
if new_solution better than global_solution:
Update_global_solution(new_solution, local_solution, destroy_opt, repair_opt);
else if new_solution better than local_solution:
Update_local_solution(local_solution, destroy_opt, repair_opt);
else
Update_worse_solution(local_solution, destroy_opt, repair_opt);
// 更新算子选择策略
Update_OptChose_strategies();
end while
return global_solution
框架主要将解区分为global_solution(以下简称s_g)、local_solution(以下简称s_c)和current_solution(以下简称s_t)。s_c与s_g的区别在于,算法中设计了模拟退火的接受worse solution策略,概率更新s_c,避免陷入局部最优解中。
每个算子都有一定的选择概率,通过轮盘赌的方式随机选择本次迭代使用的算子。
每当一组算子被选择后,根据算子更新的s_g的优劣,动态更新算子的参数,在一定步长后更新算子被选择的概率。
算子:destroy&repair相对于ALNSProgress框架,算子和所解决的问题相关度更大。前文的框架适用于任何问题,而算子部分则需要针对解决的问题进行重写。有关VRPTW的destroy、repair算子,公众号内有一篇推文进行过详细介绍:
干货|自适应大规模邻域搜索算法求解带时间窗的车辆路径规划问题(上)
这里简单讲一下小编所采用的算子。小编的算子主要参考了原先的代码,由于解决的问题不同,小编进行了修改调整,有一定原创性,童鞋们如果觉得效果不好可以自行修改、增删。
destroy算子
小编编写了三个destroy算子:random destroy、shaw destroy、worst cost destroy。
random destroy随机remove一定量客户,没啥好讲的。
shaw destroy定义了关联结点,每次选择与上一个移除的结点关联度较高的结点进行移除。关联度的计算公式如下:
int l = (lastRoute.getId() == s.routes.get(j).getId())? -1 : 1;
double fitness = l * 2 +
3 * distance[lastRemove.getId()][relatedNode.getId()] +
2 * Math.abs(lastRemove.getTimeWindow()[0] - relatedNode.getTimeWindow()[0]) +
2 * Math.abs(lastRemove.getDemand() - relatedNode.getDemand());
worst cost destroy顾名思义就是选择所有结点中对cost影响最大的。计算公式如下:
double fitness =
(route.getCost().getTimeViolation() + route.getCost().getLoadViolation() + customer.getDemand()) *
( distance[customer.getId()][route.getRoute().get(0).getId()] +
distance[route.getRoute().get(0).getId()][customer.getId()] );
变量名应该写的比较清楚,如果还有疑问,可以查看具体代码。
repair算子
repair也写了三个算子,分别是:random repair, greedy repair 和regret repair。
random repair就不讲啦。
greedy repair也比较好理解,按照greedy策略评估每个结点的最优插入位置,进行插入操作。
greedy repair的不足之处在于,总是将那些困难(能使目标函数值提高很多)的顾客放到后面插入。这使得可插入的点变得很少。regret repair对比了两个较优插入位置,计算delta cost,最大化把顾客插入到最好的中和第2好的位置中目标函数的差异。
代码查阅下载代码后在Main函数中修改算例参数,代码文件夹内包括部分Solomon算例和Homberger算例。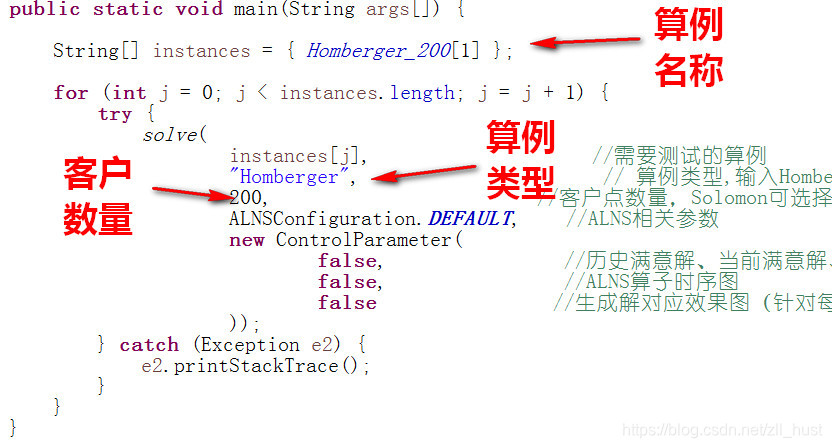
如果需要修改ALNS部分相关参数,可以在ALNSConfiguration内修改,重要参数做了注释(其实不需要管太多啦)。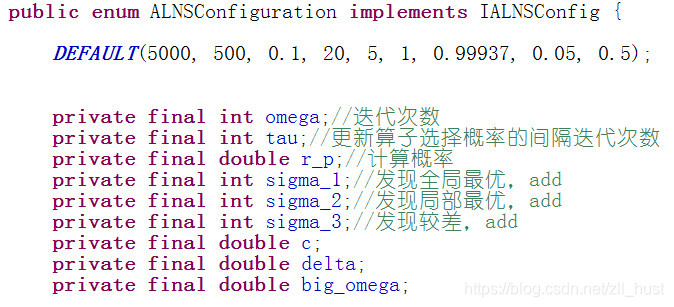
运行结果展示
各个算子的使用情况: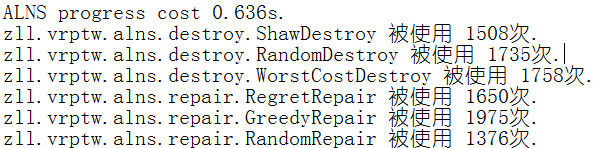
结果显示: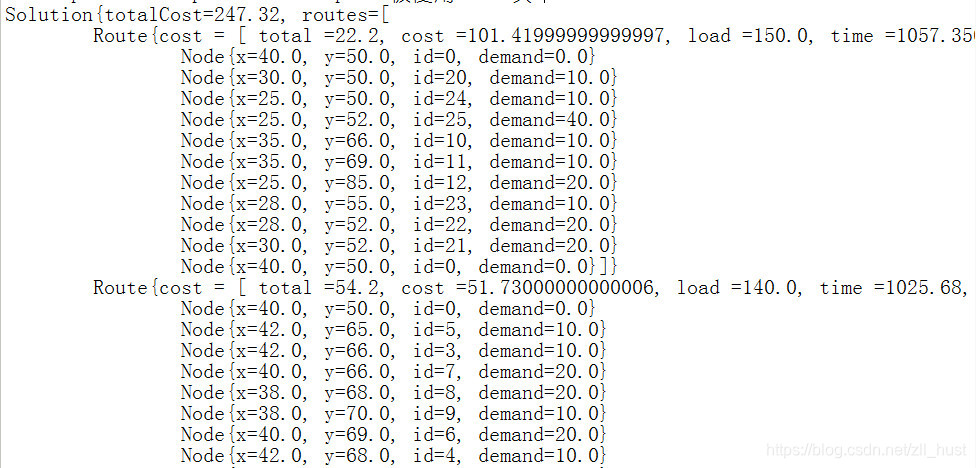
对结果进行验证: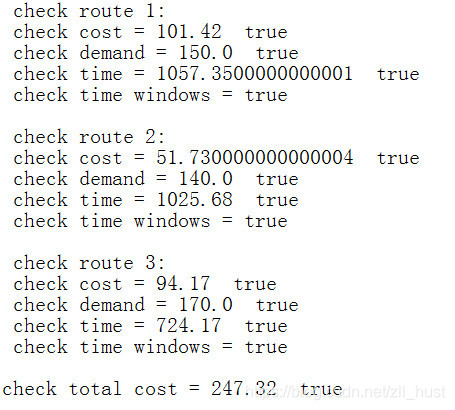
扫描二维码,进入公众号【数据魔术师】或【程序猿声】,后台回复【ALNSVRPTW】不带【】即可下载相关代码!